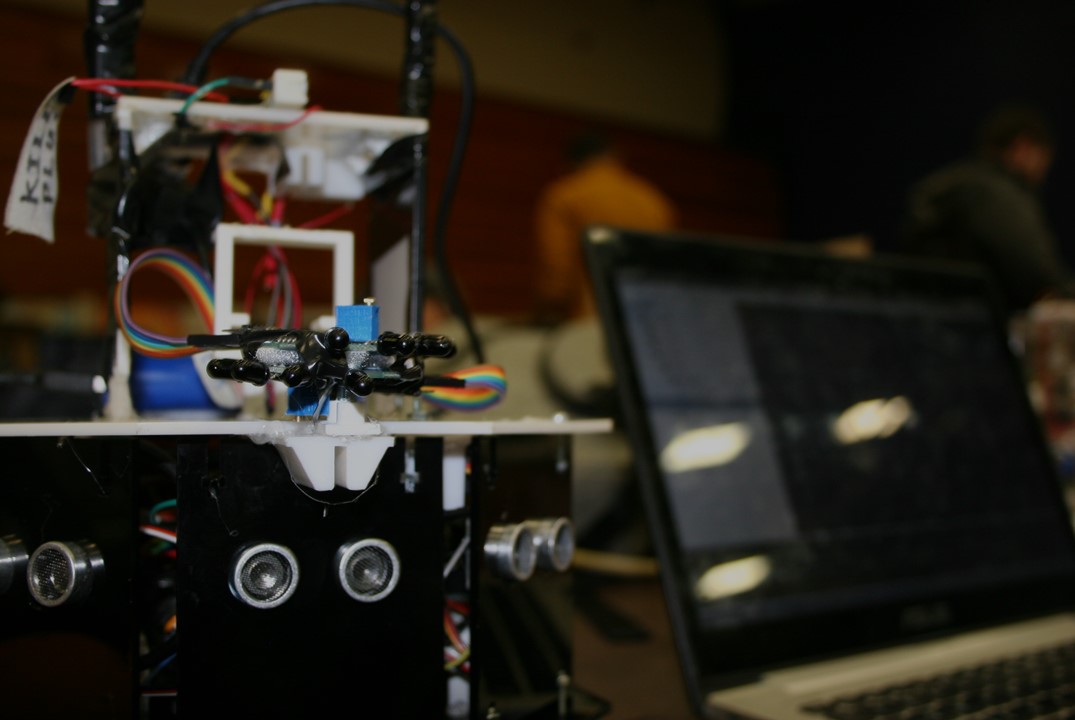
Since its inception in 2010, Tufts Robotics Club has aimed to bring together students who are interested in robotics and eager to learn and apply new engineering skills through hands-on tutorials and projects. Our club participates in several competitions throughout the year, including Norwalk Havoc Robot League (NHRL) and the Harvard PacBot competition, as well as other non-competitive projects.
As part of our mission, the club offers tutorials for incoming members – no prior programming or robotics experience is required!
Get Involved
Come to our meetings on Fridays at 4:30 pm in Anderson 206 in the SEC.
Read about our new projects
Check out our new members guide