by Fay Shaw, Postdoctoral Research Associate
Designing Biomimetic Robots is an NSF-funded project that is a collaboration between Tufts CEEO and TERC. Together, we have designed an interdisciplinary curriculum for middle school students that combines biology, engineering, and computer science and is aligned with the NGSS. Students are tasked with building a robot that digs in a simulated earthquake scenario. They study digging animals and their adaptations to then design a robot that is biomimetic (bio-inspired). This project is in its third and final year and we are implementing our curriculum in nine schools in New England including 13 teachers who are teaching 400 students. Schools include Boston Public Schools, Rockport, Lexington, Melrose, and Shapleigh. As part of our research, we conduct class observations, collect artifacts including robots and worksheets, and conduct interviews with students and teachers.
Prior to teaching the curriculum, teachers participate in professional development where they engage in the major activities of the curriculum. The unit is divided into four modules:
- Week 1 is an introduction to the design challenge along with animal analysis.
- Week 2 is an introduction to the hardware and programming with a design sketch.
- Week 3 involves building and testing a prototype.
- Week 4 involves reflection, revising the prototype, and reporting.

Students use the Hummingbird robotics kit (http://hummingbirdkit.com) to build their robots

and program using MakeCode (https://makecode.microbit.org).

The goal is to analyze the structure and function of a digging animal including its skeletal structure. The students choose which features to mimic in their digging robot.
Below is an example of a digging animal. The mole rat digs with its teeth, also known as chisel-tooth digging. The left image shows the mole rat, the middle shows a mole rat skull, and the right image shows a student robot.


The students’ robot mimics the chisel tooth digging with a jaw made from popsicle sticks. The top teeth (red popsicle sticks) are stationary, while the bottom jaw and teeth (yellow popsicle sticks) are mounted to a motor that moves up and down to mimic the jaw motion.
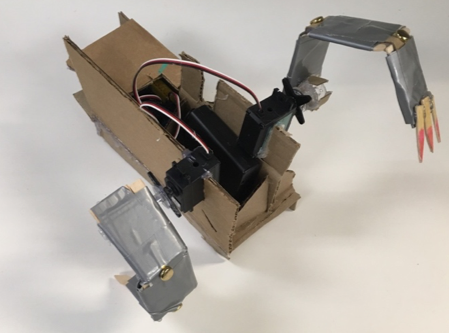
Here is another example, where the students examined the pangolin, which performs hook-and-pull digging.

They sketched their robot mechanism

and built their robot using motors mounted to cardboard.
