Scanner Bot
Scanner Bot
Scans for objects then identifies by color
Alex
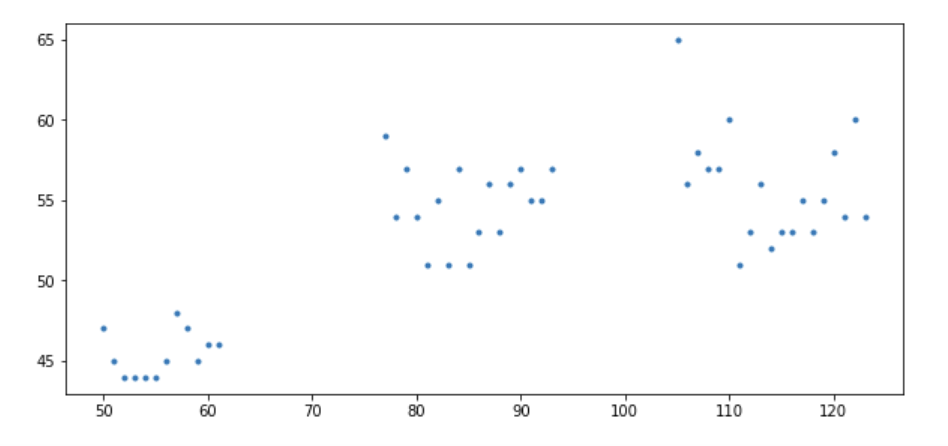
The robot scans nearby objects with the distance sensor then identifies objects with K-mean clustering. Using the resulting angles, it can crop the image for computer vision to only a very small sample of the object.
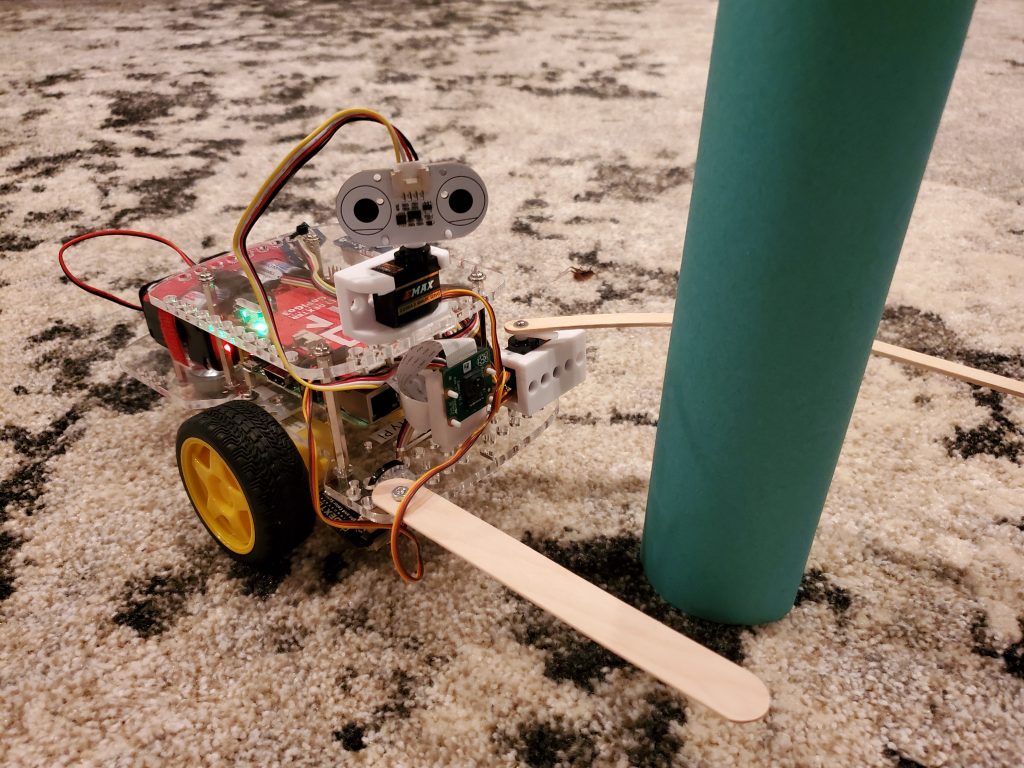
I like how you built the grabber arm, very cool!
The arm mechanism to grab the objects is really cool!
The double-jointed grabber arm was awesome!
Alex, cool robot! I’m curious about the ways the plotting of the points could be used to map a space and identify objects, were you considering any particular applications when you design this? Awesome work!
I love the arms! Good Job!
Wow that was a really cool use of both the distance sensor and the camera. Awesome!
The arm design looks really cool. The idea is also really good and could help out with sorting things in larger settings (ex. store or factory).
Looks like an wasome robot! It was a pitty to see that you couldn’t get the k-means clustering to work, Your grabber also looks awsome!
Awesome idea!
Really ambitious project! I can see the beginnings of a terrific project. The graphs are super impressive by themselves. I hope you keep going and get it to work. How many big companies have to push back launch dates because their team of well-paid engineers couldn’t get a feature to work? SO MANY – it’s part of engineering!
I like how the grabber arm was simple yet efficient.
Oh you could totally use KMC to find the clusters! Let me know if you want to talk more about how to find them This looks awesome and you are most of the way there. 🙂
I liked it a lot! very cool!
Good data gathering
I like the charting and graphing! Also i had a lot of trouble with my distance sensor on top of my servo so i think that was really cool that you got it to work
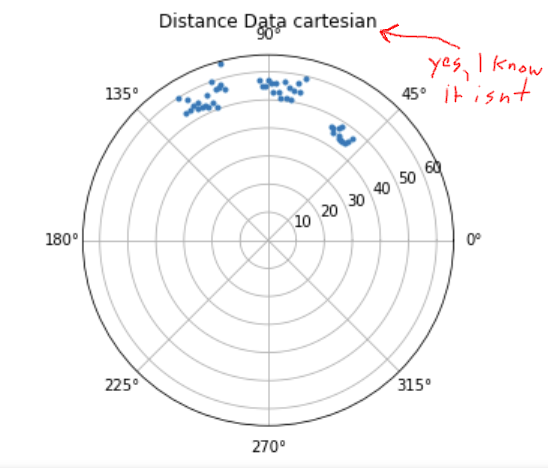
use of polar coordinates is cool
The coordinates is really cool and original
The whole graphing programming is insanely cool, as I don’t think I’ve seen anybody do something even remotely similar.