Ping Pong Ball Launcher
Ping Pong Ball Launcher
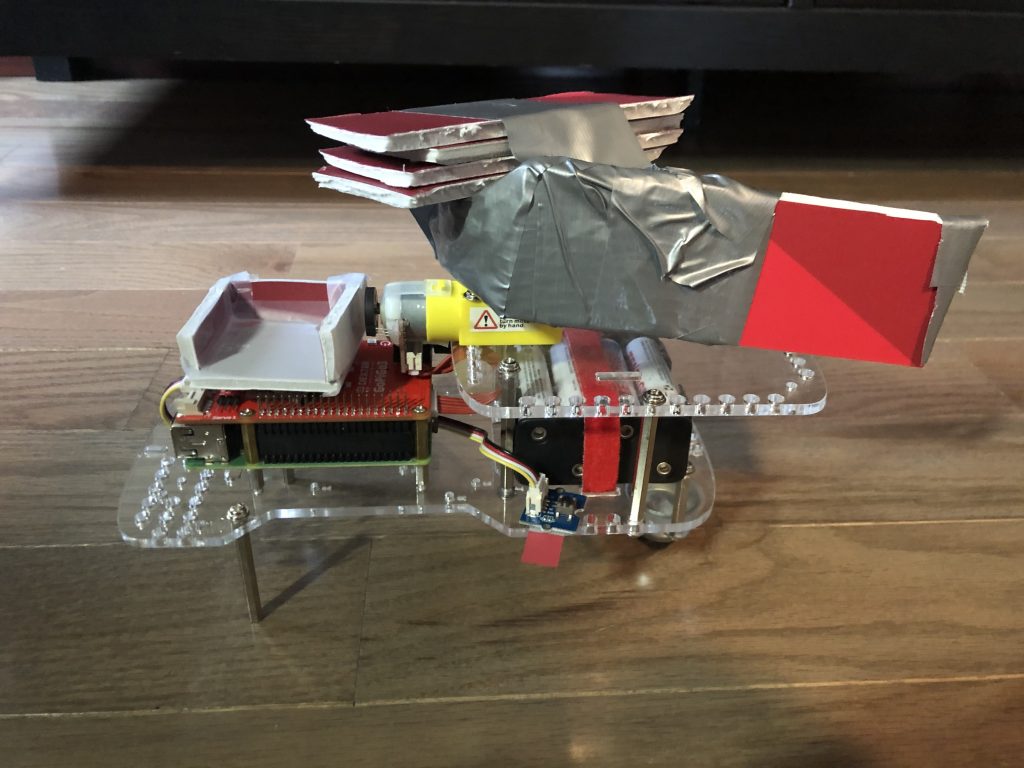
My robot flicks a ping pong ball off of my desk and into a cup at the press of a button.
Julian
My robot’s arm is activated by a button. When activated, the robot arm swings around 270 degrees at max speed to hit the ball. It then pauses and resets the arm. By pressing the button again, the robot arm can flick through again, allowing for the user to reload at their own pace. If the button is held for over 2 seconds, the robot arm turns off and the code is complete.
The accuracy is amazing!
Thanks!
Wow, you did a great job getting the ball in the cup consistently!
Thank you! Choosing a strong material for the arm helped me make sure the ball would go in consistently.
Surprised at how accurate the ball is, maybe it could play basketball?
Unfortunately not, the motors are not powerful enough to launch a ball against gravity, and since I use a motor to hit the ball, I couldn’t make the robot move. Although, with a bit more time and materials, I’m sure that is possible.
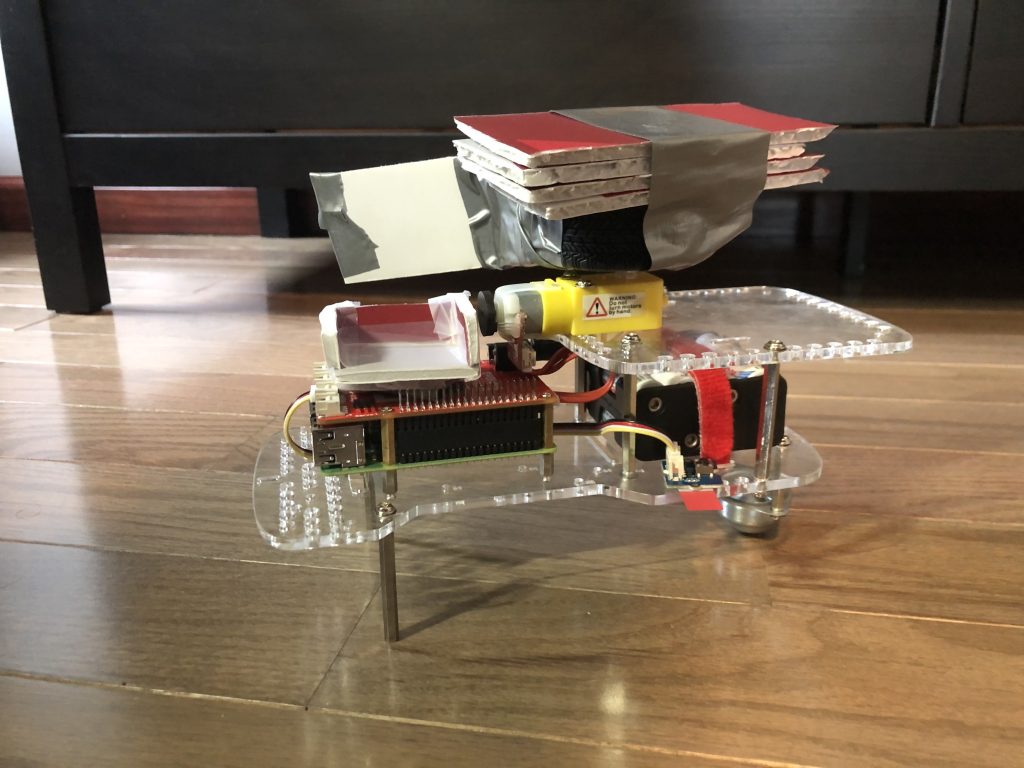
My favorite part of this whole thing was the mechanical design you had to put into it and how little this looks so little like the original GoPiGo. So neat.
Thanks Dr. Cross! I could not have done this without your help! The extra hardware and resources in my house came in handy.
It is so accurate! And I love how you incorporated the button to tell it when to fire
Thanks Teddy! I could not have incorporated the button without the help of Dr. Cross.
It must have taken a while to get it that accurate. Nice job!
Thanks! I got lucky with trial and error for accuracy, but the encoder values to make the arm rest to its original alignment took a long time.
Very cool! I like how the arm is activated by a button.
Thanks! I wanted to allow the user to activate the mechanism at their own pace.
Cool project! Very accurate!
Thanks!
I like the way you reconstructed your robot!
Thank you!
Very nice how it launches right into the cup!
Thanks!
what a creative way to use the motor, I would have never thought of that!
Thank you! After my first project attempt to create a jugs machine failed, I figured hitting the ball would be the next best thing.
I like that you used the motor the make the arm rotate so quickly!
Thanks! I set it to max speed and watched the ball go!
nice mechanism, looks like it works very well
Thanks. After lots of trial and error, I got the mechanism to consistently work.
Good mechanism
Thank you
The button activation is a really good idea
Thanks! I wanted to make sure the user could load the ball at their leisure.
You did a really great job with testing and iterating on your original robot design whenever you encountered problems. Launching things is very much a difficult physics problem, but I’m really impressed with how you countered those limitations. Great work!
Thanks Libby! I appreciate all of your help in building my robot. My problem-solving and debugging skills were greatly enhanced thanks to your help. I wish I had taken physics before this course, but I’ll have it under my belt come college. Working around limitations and failures are life skills and I’m happy to have further developed these skills during this project and program.