Ball Retrieval System
Ball Retrieval System
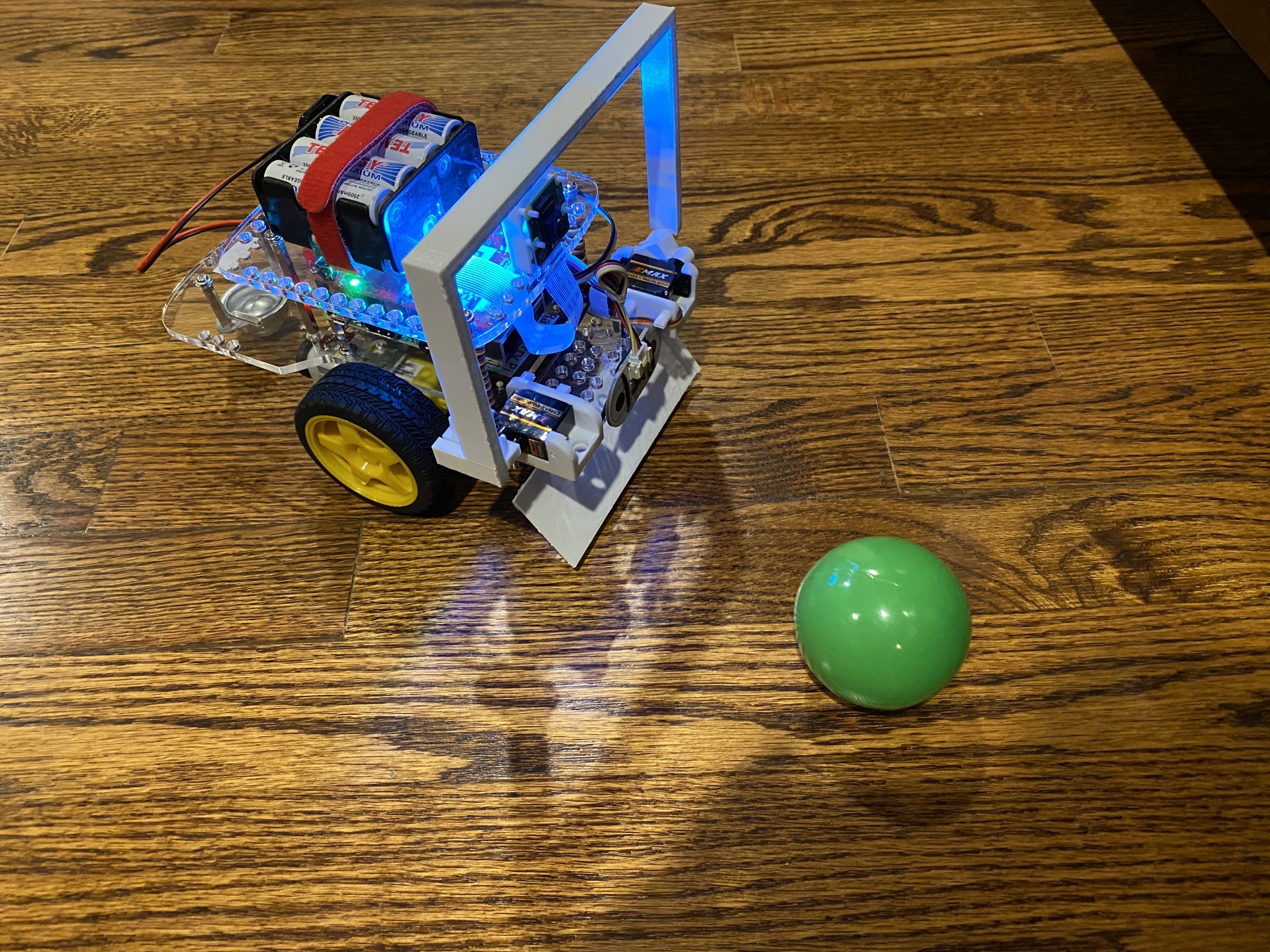
The robot finds a ball in a room, picks it up, and brings it back to its starting location.
Reese
The robot uses the camera while spinning to search for the green ball. Once the green ball is detected in the camera, the robot will align itself in a straight line pointing towards the ball. The robot moves towards the ball and can readjust while moving to keep the ball straight ahead. As the robot gets closer, the distance sensor on the front of the robot detects the distance to the ball, stopping 1 cm away. The two servos then move two custom printed parts to capture the ball. The robot then turns around and drops the ball off at the starting location.

I like the grabbing mechanism, it keeps the ball very secure
Very interesting mechanism.
cool, nice use of 3D printing
The grabbing mechanism looks great
The 3D printed grabbing mechanism was really well done, not only containing the ball but also picking it up. Very well done!
The 3d printing made it look a lot nicer and also a lot more reliable than what I used to store the ball on my robot
The grabbing mechanism looks really good.
Awesome design on the grabber attachment!
Was there a specifc method you used to help make sure the robot did not under or overshoot the ball? Or was it a more trial and error? Also does the camera have a hard time if the ball is smaller? Overall I think this project is super cool because with more time, you could make it sort balls/object based on color. Awesome work!
There is a distance sensor mounted on the front that slows the robot down as it gets closer. The camera keeps the robot aligned straight so that the distance sensor can detect the ball and not run into it. I found that the farther the ball is from the robot, the harder time it has staying pointed at the ball, so sometimes it failed. I did not try with a smaller ball, but it should still work as long as it can still be picked up by the scoop. Also, color sorting is a good idea!
Really interesting! What do you think was the most challenging part of the project? Impressive work.
The most challenging part was getting the robot to align correctly with the ball. A close second was getting the robot to return to the starting location with relative accuracy.
The grabber attachment is really unique and works very well! Great job!!
the grabbers have a really cool design, good job!
The grabber is super cool, and well designed!
Great design and I really like the diagram you made for the beginning of the video!
This is a really cool design! Great concept and with some tweaking I’m sure it would work even better!
I thought the ball stuck between the two pieces was the design 🙂 can you think of changing the claw design to scoop objects of different shapes. This could be a useful toy. Say I kicked my cup under the bed and I can’t take it out, I can program your bot with the color of my cup and send it pick it up for me. You might need to add an LED though. Nice concept!!