Robotic Hockey Opponent
Robotic Hockey Opponent
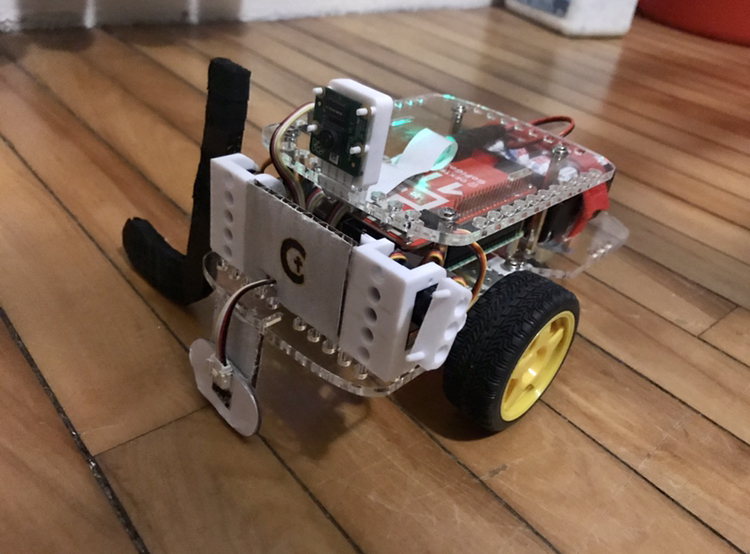
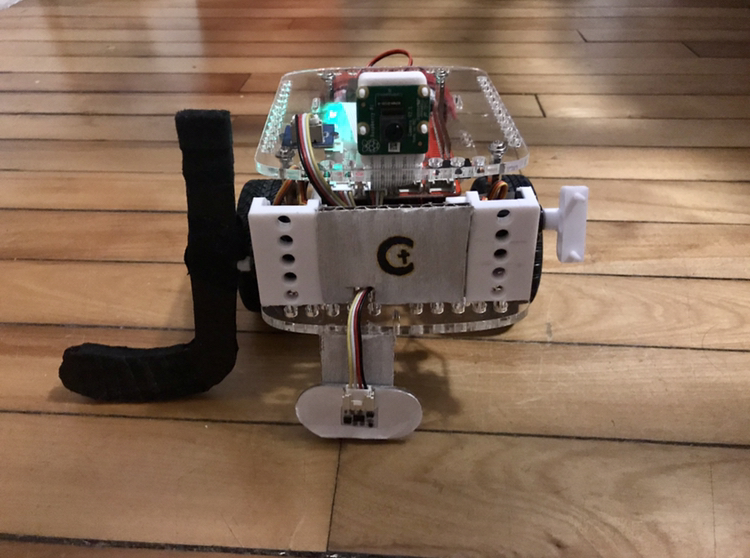
This robot can be used to imitate an opponent in hockey.
Emma
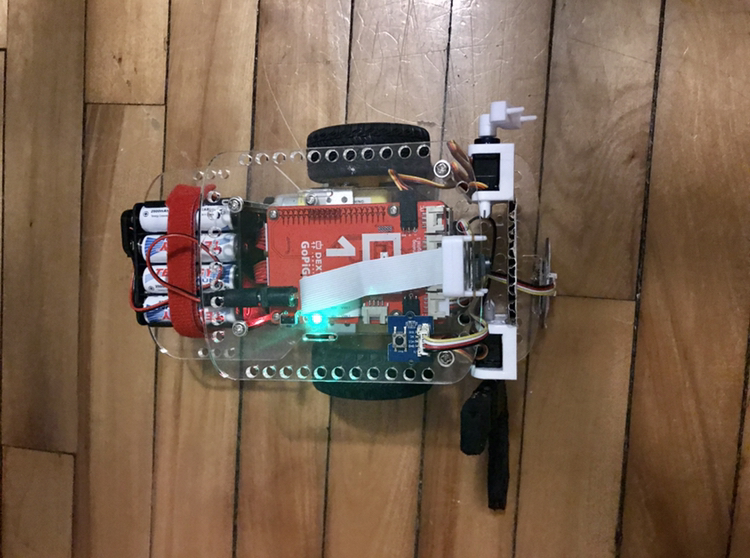
My goal for this project was to create a robot that will apply pressure to me while I am doing stickhandling drills. I started by coding the motion, so the distance sensed was relative to the power of the wheels. Then, I set various LED lights for each of the distances. I also had the servo with the stick attached move when the distance was between 15 and 5 cm. With these sensors, the robot can try to knock the ball away.
I really like how you got the robot to become a hockey player that’s really cool! Nice job!
Seems quite useful for training and also having some fun.
This one was really cool! extremely creative
This one was solid. Great job!
That works really well, awesome!
I really like this idea. It also looks like it works pretty well.
Very creative! It worked really well!
I like how you showed each step of the process in the video. The closing edit is great, too.
I like the step by step process! Very cool.
Good for practicing and playing alike.
I like how the robot could play with you!
this is really smart, I would totally use this if I played hockey!
Super competitive! Must be really fun to play with!
I love the design of the mini hockey stick
Nice use of the servos to make the stick move! I also liked that you had it move back and forth depending on the distance!