Bronze Shipping
Bronze Shipping
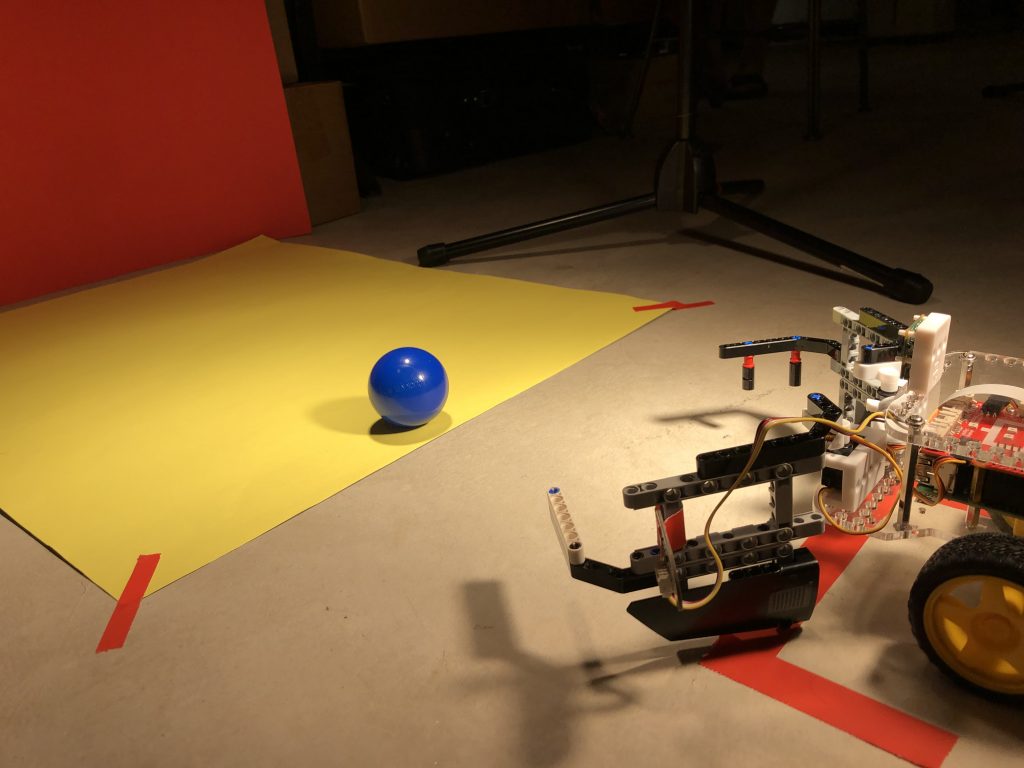
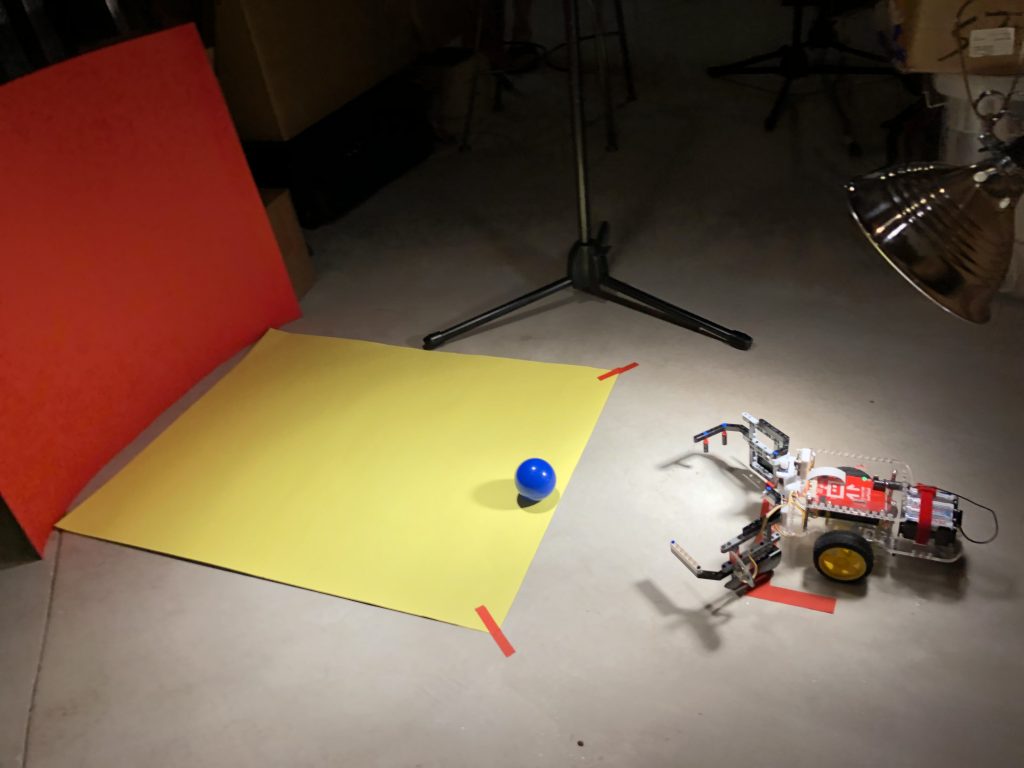
Bronze Shipping locates the object and transports it.
Danny, Nick, Andy, Julian
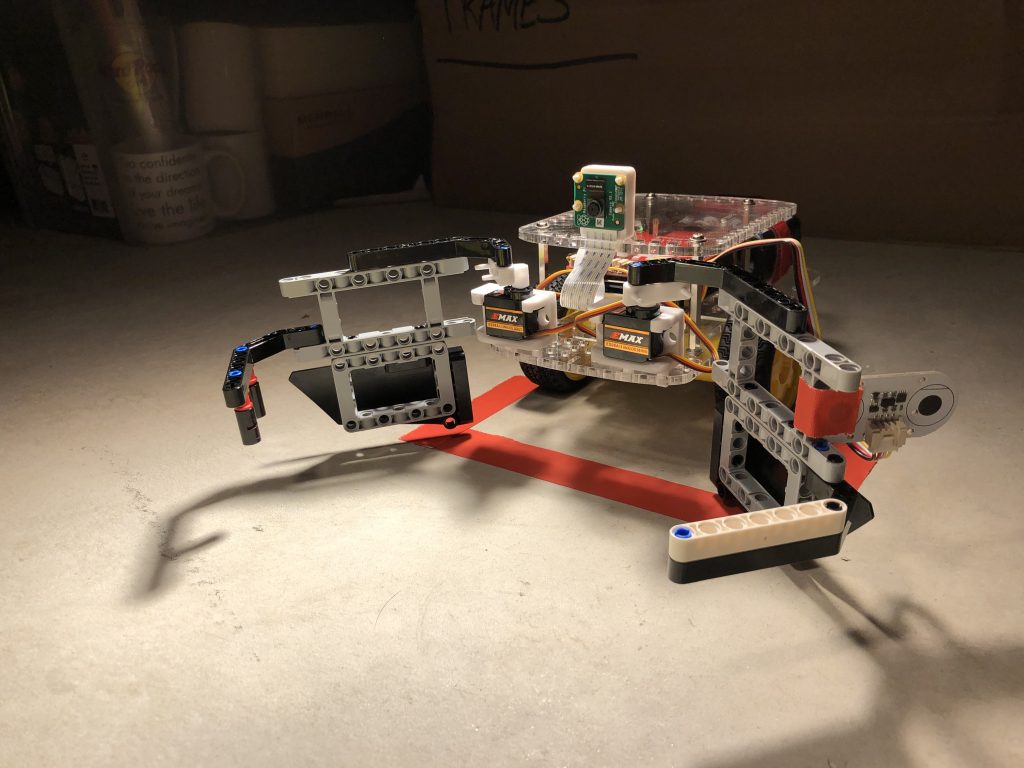
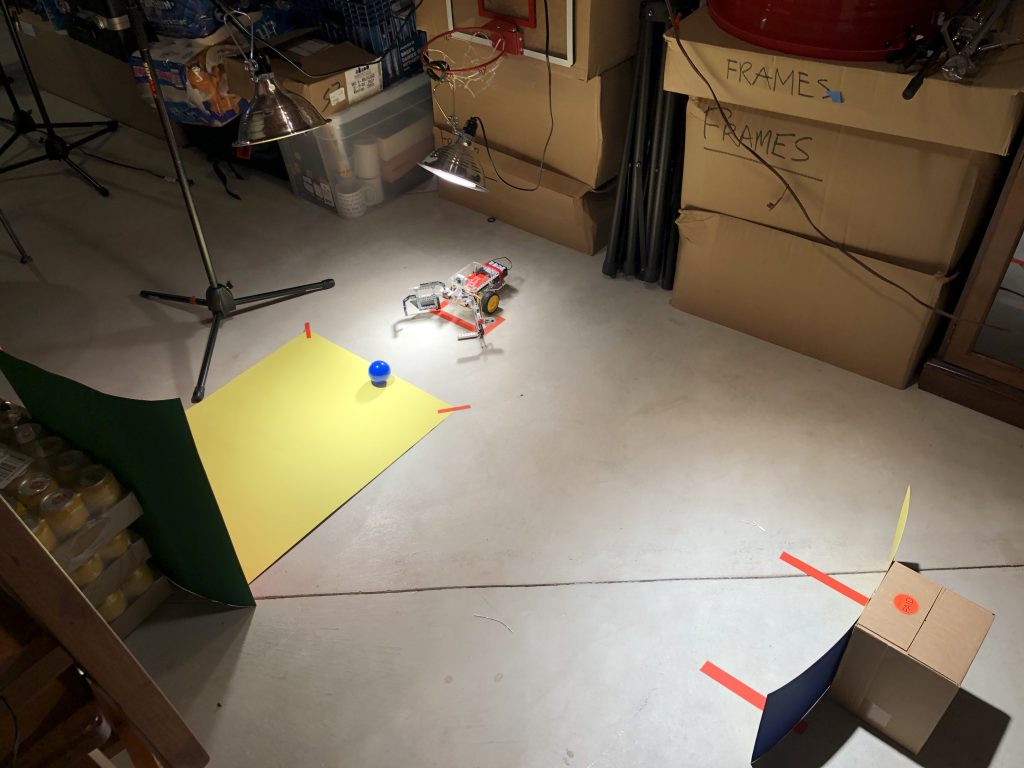
Using the camera and the color sensor, Bronze Shipping locates the ball. Then moves towards the ball, grabs it with lego claws powered by servo motors, and transports it to location. At the parking location, the robot opens its claws and releases the ball.

lol 🙂
I thought it was pretty funny too.
-Danny
Fun video guys, very professional! How did you manage to work together as a virtual team to make the Bronze Shipping dream a reality? (go bronze!)
very carefully. (lol)
tbh we just had one person “lead” the project (me) and specialize in certain areas. For example, I built the robot and built the course, Danny and Andy split up the coding
I really enjoyed this video, defintely will be using Bronze Shipping instead of USPS. Did you all run into any major struggles working in a group virtually? What tools did you use to help each other participate? As for the robot, I really like the design. I wonder if you had more motors available, could you attach some sort of plat form to raise the object off the ground?
we had a lot of struggle by the end of the project, but the r&d process was smooth because we split up the work and communicated with each other clearly and efficiently (aka we had a groupchat)
if we had more motors, idk if we would have put a lifting mechanism on it. we were carrying a ball, so that would have been redundant.
GO BRONZE
reply to this comment if you like bronze
GO BRONZE
WHAT HE SAID
go bronze!!!
BRONZE
stan bronze!!!
This is a really good idea and I think that it is definitely possible to use this in the work place.
Great project. I like how you guys were able to collaborate on this robot and I found it impressive at how accurately the robot was able to return to where it initially came from.
Video is well edited and the robot does a good job. Great collaboration.
–Ian
Thanks. I am glad you enjoyed it.
What a cool project. I was very impressed by how your robot was able to travel to a non-hard coded destination and then return to origin. I’d love to know how you were able to pull that off.
Thank you for the compliment.
Great job with everything. I love the use of the camera sensor and was really impressed with how the robot returned to it’s origin. I’d love to see if it could be used with more items in the future. I hope you all continue collaborating in the future and make great things happen.
Thank you. I had a lot of fun working with my teammates.
I really liked the way that the end location was not just a simple predetermined destination and instead looked for the endpoint at the circle. Definitely more applicable and the claw design was great.
Thank you for the compliment.
yes.
Your welcome
I would pay to watch a bunch of bronze shipping bots attempt to play baseball. Also the sensor use was great.
How much?
This is great, I think the industrial applications of this concept would be very helpful. Great job.
Thanks a lot. I am glad you believe this product could be helpful.