Piano robot
Piano robot
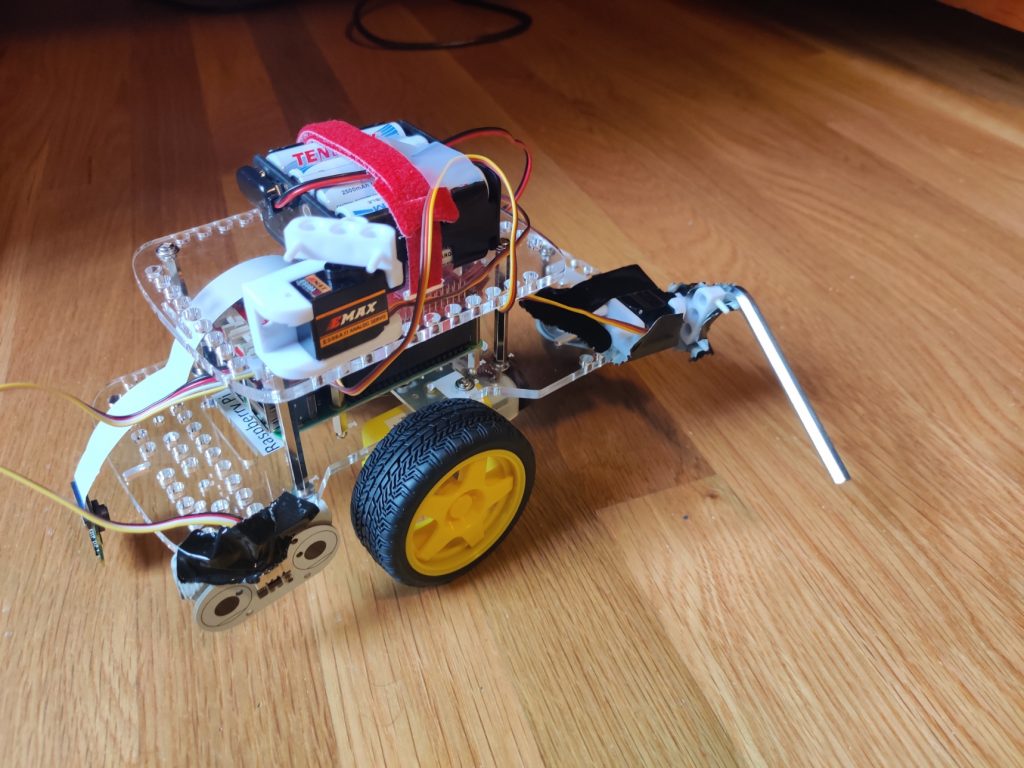
This robot allows you to input a tempo and 4 chords, and the robot will play those notes at that speed on a piano.
Zev
This robot was made to put my piano to use and help me practice guitar. When you input a note on the computer, the computer interprets it as a number, which corresponds to the position of that note on the keyboard. The robot will drive to that spot and then, based on the tempo you inputted, wait a certain amount of time before pressing the key and moving to the next note. There is also an ultrasonic sensor that makes sure the robot doesn’t stray too far from the keyboard. I used this robot to help me practice improvising guitar over various chord progressions and to practice building songs around simple keyboard loops.
Impressive! The overlap between music and engineering is always super cool. Did you have to start it at a specific key for it to know where to go? How did it keep track of the current position?
Thanks! It always had to start at C, and it used encoders to know its current position
i really like this for playing music. it feels really useful.
Thanks!
This is awesome! Like a robot “player piano”. The sampling at the end was a really nice touch. Did you use any particular sensors on the robot? (e.g. did it “know” what note it was playing) Any ideas for what you would add next to this robot if you were going to work on it another week?
The ultrasonic was the only sensor (it was used to keep it the correct distance from the piano). The robot kind of knew what note it was playing, when you enter notes in the beginning it converts the notes to encoder values, and that’s where it drives to.
This is so dope, I also play guitar and I really like how you sampled over the piano and made a song out of it, I wish I thought of this, nice work
Nice, love to see another guitarist here. Thanks
This is all really impressive. It would be good for it to be able to play more songs and to give it a second hand to play chords.
Playing music definitely helps with boredom. I definitely use this. Also, maybe try and make the arm hold down the note for a longer time? I don’t know, just a suggestion.
Great suggestion. I really wanted to do that but currently the robot is too slow to hold the notes down and then make it to the next note without having to really lower the tempo. If I raise the motor speed it’s too unstable and overshoots the notes, and then it has to spend even longer correcting the mistake. I’ll have to think of a better way to make this work. Thanks!
This is really cool. What is the range of tempos that it can play at?
Currently the robot is really slow, so only around 40 bpm. If I raise the motor speed it can do much faster, like around 80, but then it usually overshoots the notes and plays it incorrectly. Note quite sure how to fix the issue yet
Very cool project. I like how you were able to make the robot into a device that keeps a solid tempo.
I think the idea was creative, and it’s really interesting and different to have it actually play an instrument rather than just play a recorded song
–Ian
This is a great idea! Do you know how fast it can switch between notes when playing a song?
Its pretty slow, but at 30 bpm it can reliably do a major sixth.
This is such a cool project idea! I love the idea of programming a robot to play an actual instrument. How does the robot know which specific spot to go to? Is it just based on the motor encoders?
Yeah, nice guess! thanks!
Really love the idea and I can imagine it would be really useful. I love how accurate you made it. Great job getting the distances down and finalizing something really accurate.
Thanks!
I think its really cool to use a robot as a layer for a song. Do you think you’ll continue with the project later and improve it by making it be able ton play more notes or have faster playing speed?
I think so. If i continue working on this my main focus will be reliability and playing notes for longer duration while still being able to make it to the next notes. I’ve found practicing improvising guitar along with something makes it a lot easier and I hope this can help me improve. Thanks!
This is really cool! It would be awesome if in the future, you incorporated AI to have the robot make its own music.
Great example of some electronic music