Robo Fetcher
Robo Fetcher
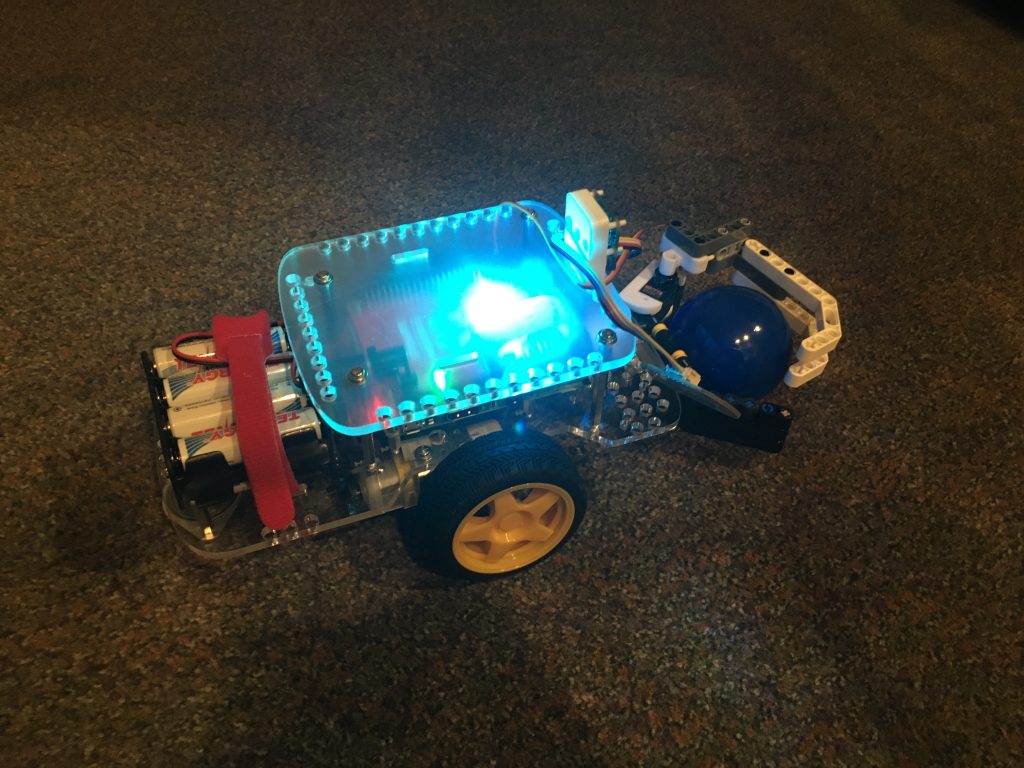
Robot finds and retrieves a ball.
Ian
The robot uses the camera to find the ball and then orients itself based on the ball’s relative position in the camera. It uses a servo to operate its grabber, and moves to, grabs, and retrieves the ball. It also can spin until it detects the ball even when it doesn’t initially see it.
I’m impressed at how well you got the proportional control to find the ball. When I did this notebook, I failed at doing this.
Thanks. Mine didn’t really work very well on the first try with the notebook either, and that’s largely why I went back and fixed my issues. – Ian
Great job with the grabber. It has a great design and the proportional control is just the icing on the cake. Great job expanding on the previously learned topics and really turning those ideas into an awesome project.
The grabber was also probably my favorite part. I’m happy I took something I had lying around, improved on it, and created a grabber that had pretty much 0 issues. Thanks. – Ian
I really liked your project. This is a much better approach to the original ball grabbing code! I’m really impressed that you were able to pull off the action of locating the ball while spinning – that’s seriously hard.
Thanks. It definitely was difficult but I managed to fix it all with time. Detecting the ball while spinning was still pretty hard, and I definitely couldn’t get it to work 100% of the time. – Ian
Great project. I was impressed with the grabber and how well the robot was able to find the ball.
Thanks. Getting it to find the ball was hard, but definitely rewarding. – Ian
The grabber design and very intuitive and I like the big improvements to the grabber. What were some of the challenges when working on this project?
I think the first big challenge was the ball recognition. When doing the notebook I made a pretty decent ball recognition system, but I found it wasn’t good enough for the actual project. I had to go back and rethink the whole thing. Then I had to change the spinning to be much smaller adjustments using proportional control, which took a lot of time. – Ian
Hi Ian! I’m super impressed with the work you’ve done to have the robot spin until it sees the ball, I know how tricky that is, well done 😀 Does the light on your robot help the color sensor in some way?
It is amazing how precise it is. I also like how the light is blue and the robot is blue.
This is actually really cool and a great code that you did, nice job
I find it very impressive how you were able to get the camera detection working even while moving, as I was having some trouble just getting the robot to detect things while it was stationary.
I really like how you made the robot do small adjustments when it sees the ball. When I did it, I just had my robot spin in the direction that centers the ball, which doesn’t really work.