Robotic Player
Robotic Player
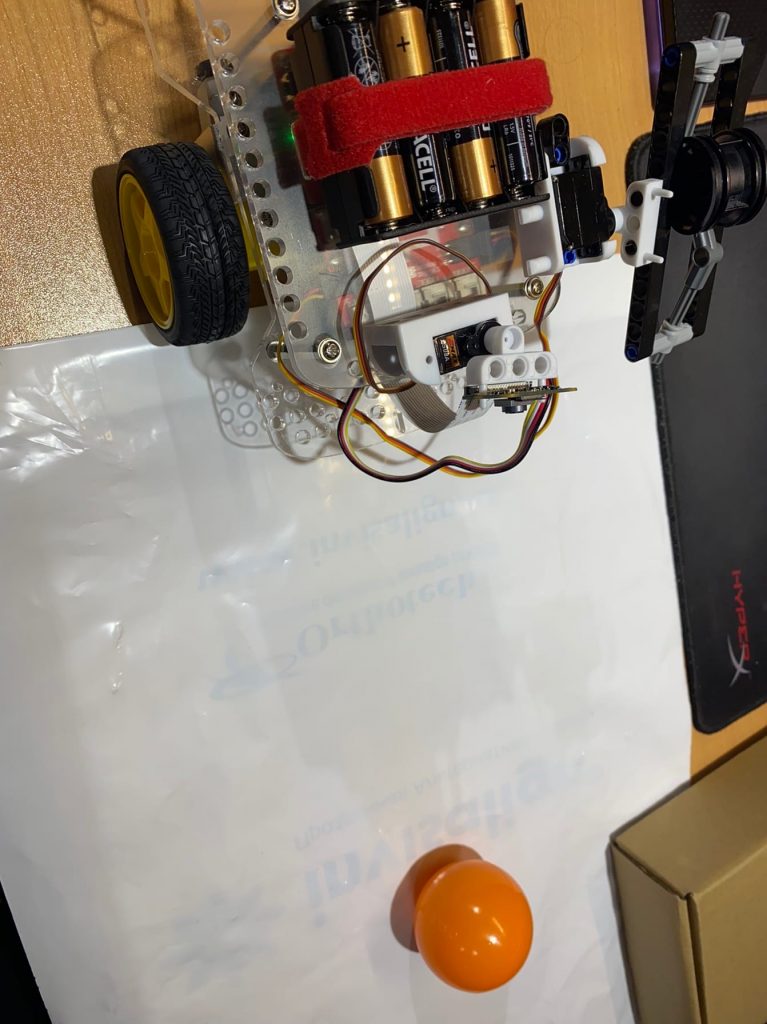
Using the pi camera, and robot to find an orange ball (fellow in the game) and then throw a smaller lighter ball in it.
Arnur
First of all, the camera finds the orange ball and aims the robot arm on this ball. If the ball is not in the center, the robot is going to move to change the position to a better one.
nice robot
I really like the concept! It’s unfortunate that this could not work, but parts of your code reminded me of what I originally wanted to do with my project!
So what was the servo for? Was it supposed to trigger some other sensor that you did not have time to set up? Otherwise I like the concept and idea!