Roving Camera Robot
Roving Camera Robot
This robot takes input from the user as to what direction to move while taking pictures of the surroundings!
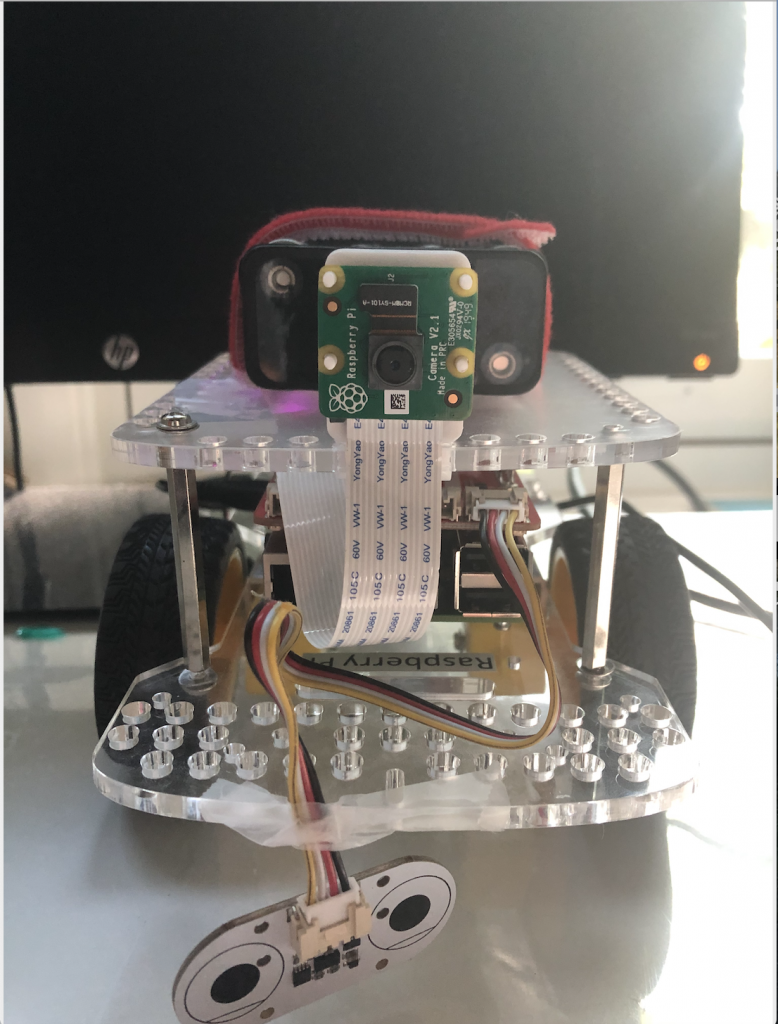
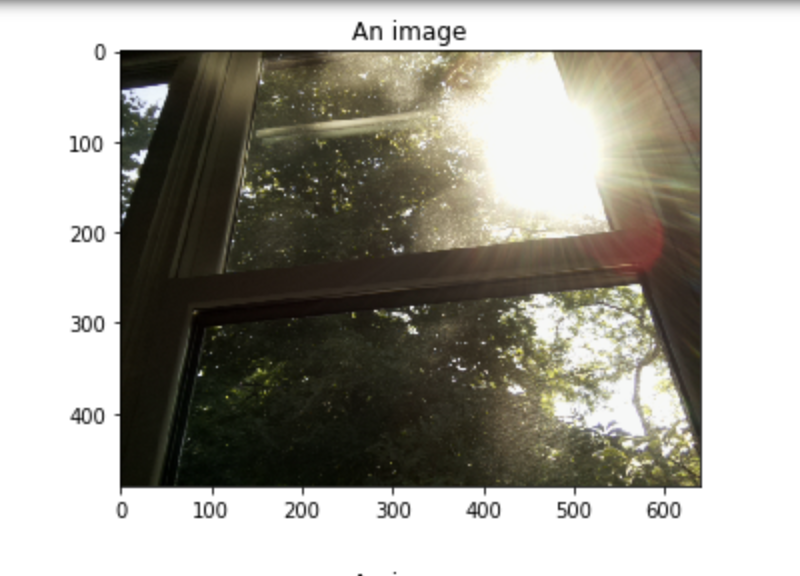
My robots asks the user to input a 1 or a 0 to indicate the direction it should go. Then, while driving, it takes continuous photos so that the driver can see what the robot is seeing, in order to not run into obstacles, and possibly look for objects around the driver’s house. My robot uses 2 sensors and the motors, and my hope was to use a third, but I did not have time. Sensor 1 is the camera, which is pretty self explanatory, it takes the photos. Sensor 2 is the distance sensor, which transmits a reading (in cm), that, if it is less than 5, stops the robot so it doesn’t run into the wall. I wanted to find a way to use the button or loudness sensors, but I did not have a chance.
I think it is so cool that you modified the code to do so many different things! What do you hope to be the purpose of your finished product?
Thank you! I don’t have a specific idea for a final product, but one of the things I want to use it for is finding things around my house without getting up.
Was this intended as a sort of security drone? The remote controls seem kind of sketchy, but that may be due to the lack of time to spend polishing.
It could be used for security, but it was more intended to be able to find things and be able to see while driving around. As for the controls, it was partially due to lack of time, and partially due to the fact that the camera and controls can’t function at the same time.
Very neat! It makes me think about a planetary rover (like the mars lander robots), exploring and documenting an unknown area. You mentioned that you had wanted to add on a button or loudness sensor – what would you want to have those do or add? I think it would be fun to use this with some object recognition on the camera and then have the robot … for example… help me find my lost keys or shoes 🙂
I would definitely like to use object recognition, and I wanted to use the loudness sensor to determine where my family was in the house when driving around.
I think this is a great idea and a really cool robot. I love how you can input your own commands.