Stop Motion Security Bot
Stop Motion Security Bot
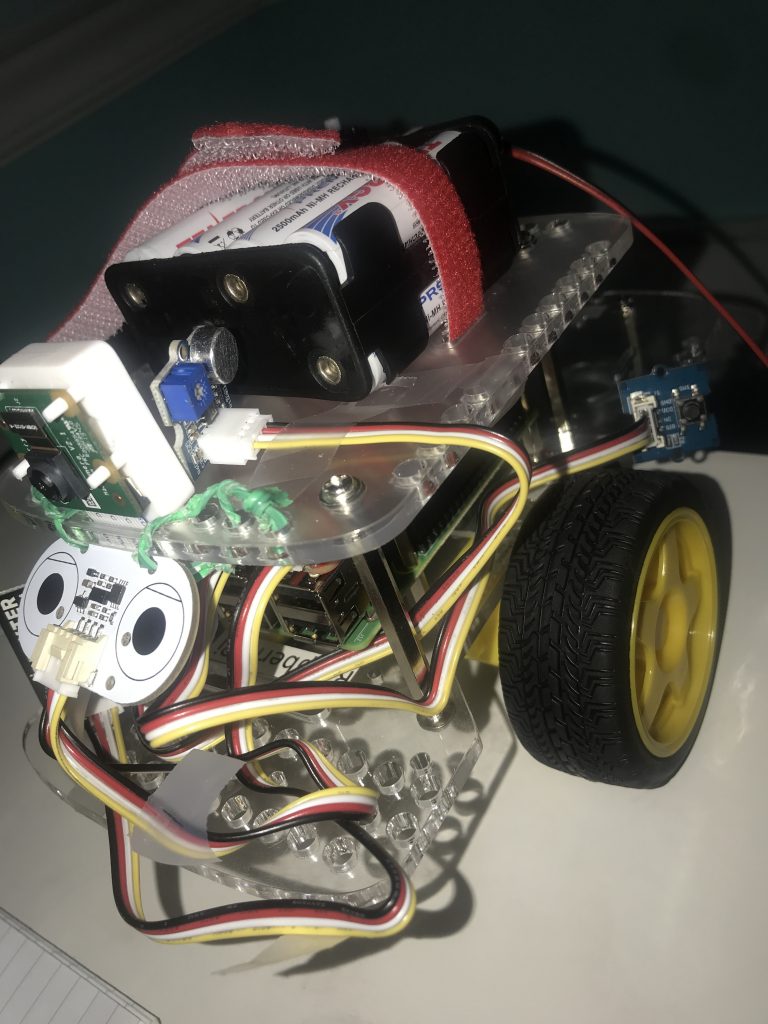
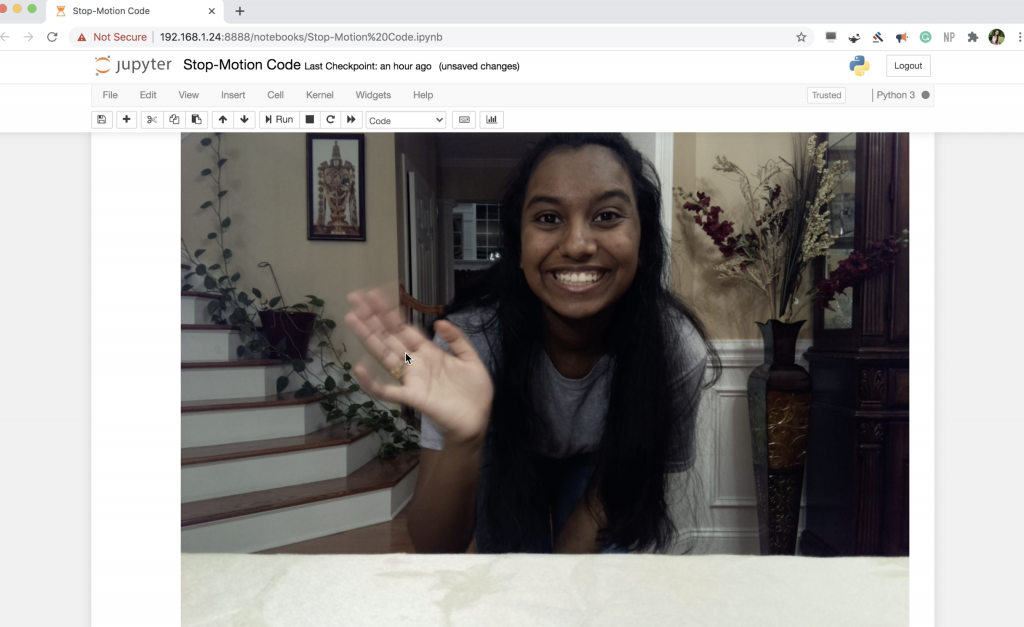
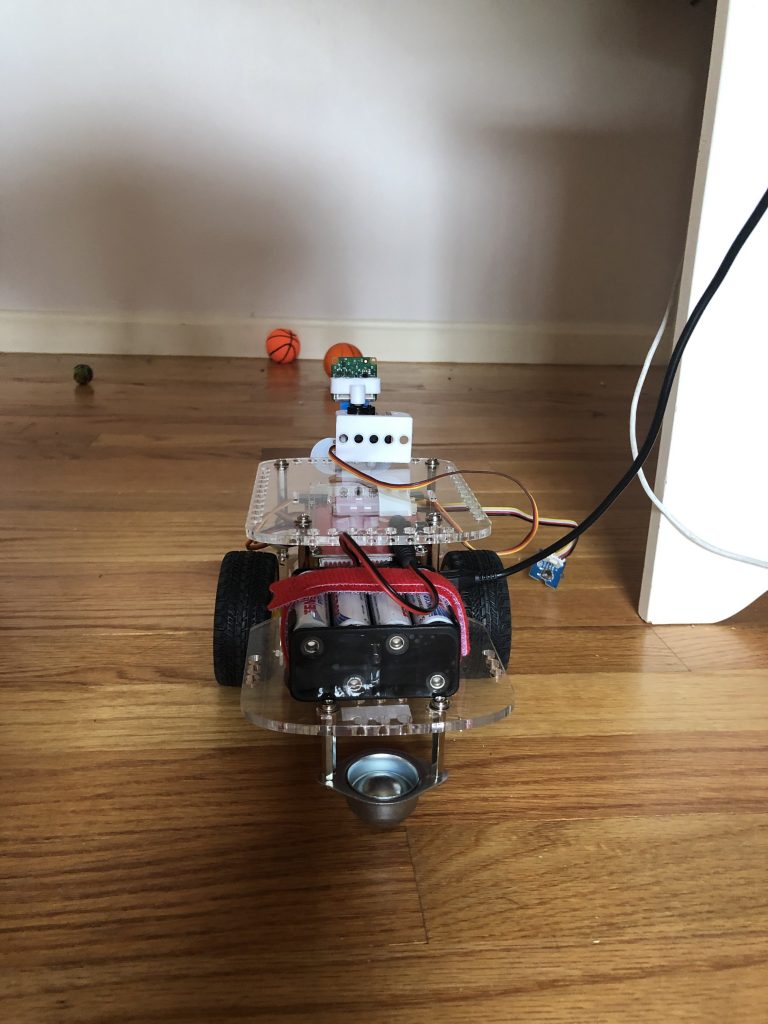
When the Stop Motion Security Bot senses motion within a variable distance, it begins taking pictures and can either upload them separately to the computer or display a stop-motion video of the object moving.
Apoorva, Helen, Sarah
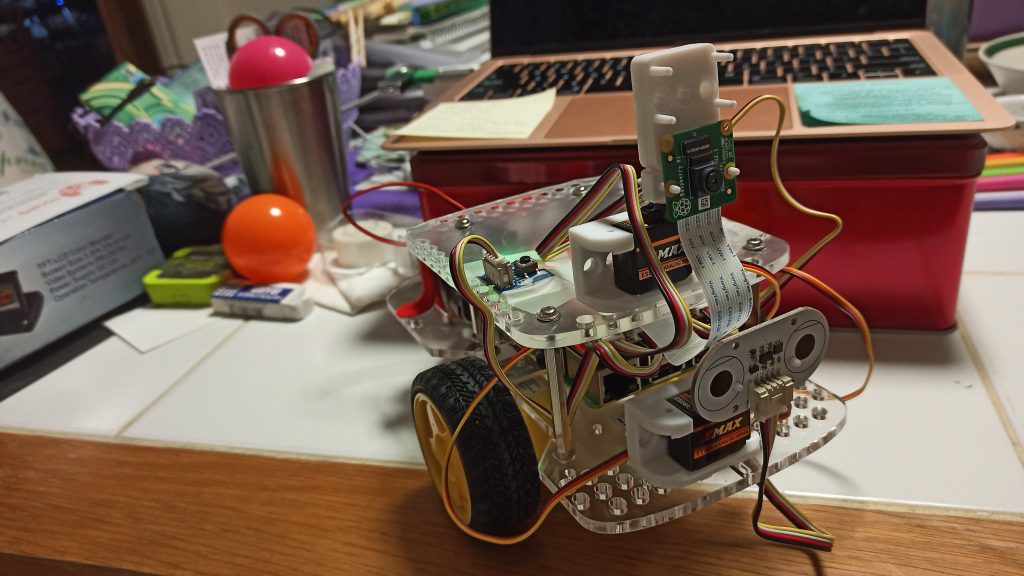
For our EDL final project, my partners and I modeled a Stop-Motion Security System that can be implemented in buildings to monitor people going in and out of a building, see when packages arrive and capture a series of pictures of any possible intruders. Our goal with this project was to replicate a dependable security camera for a cheap price that the user can alter themselves. Like currently distributed high-tech security systems such as SimpliSafe and the Ring Alarm, our product would provide footage of motion detected activity. This design could even be implemented in classrooms or individual banking drawers for security on a lower budget. A consumer could theoretically use this design and program logic to set up multiple cameras to capture stop-motion videos of activity around their home that can be uploaded to their “Raspberry Pi”. We hope to expand this project by finalizing a way to transfer and save the content to the Cloud or mobile device for later access.

This project feels very polished and well rounded! One flaw i do see is that anything could probably trigger the sensor and make it start recording, like a bird or something.
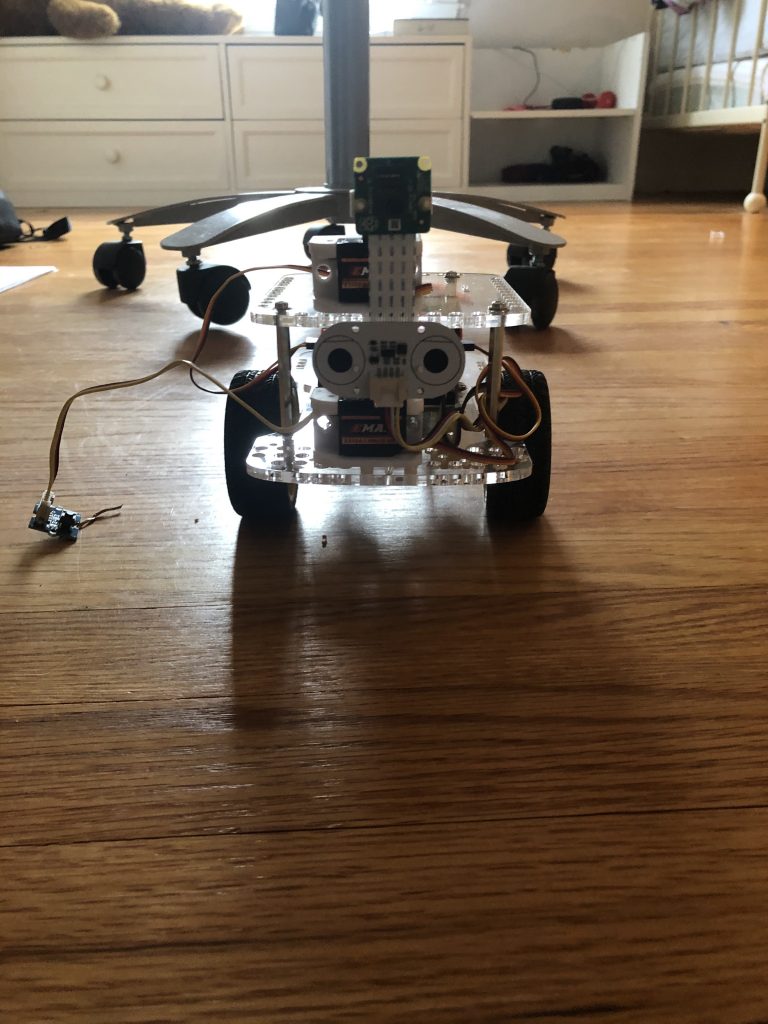
Thank you so much! Yes, the distance sensor will definitely pick up motion from other objects, but once the object is out of range, the camera will stop taking pictures. We figured that it is better for the camera to capture most motion instead of trying to filter some out, which would risk not being able to capture what the user really wants to see.
Nice project, I like how you’ve each put your own spin on it! What did you guys think about collaborating virtually? How was working on a team but having your own code and robot different than other team projects you’ve done?
Thank you! I loved collaborating with Sarah and Helen virtually because we were able to share our screen and talk through the logic of our code. When one of us would get an error, we would explain to the others what the code is supposed to do and usually catch our own mistake! I felt that we learned so much from each other, and we able to finish the project on time because of our collaboration. Unlike other group projects, we all were able to put our own insight into the robot and learn together.
I really like your project! Props to you guys for being able to collaborate virtually!
Thanks Brianna!