Table Sweeper
Table Sweeper
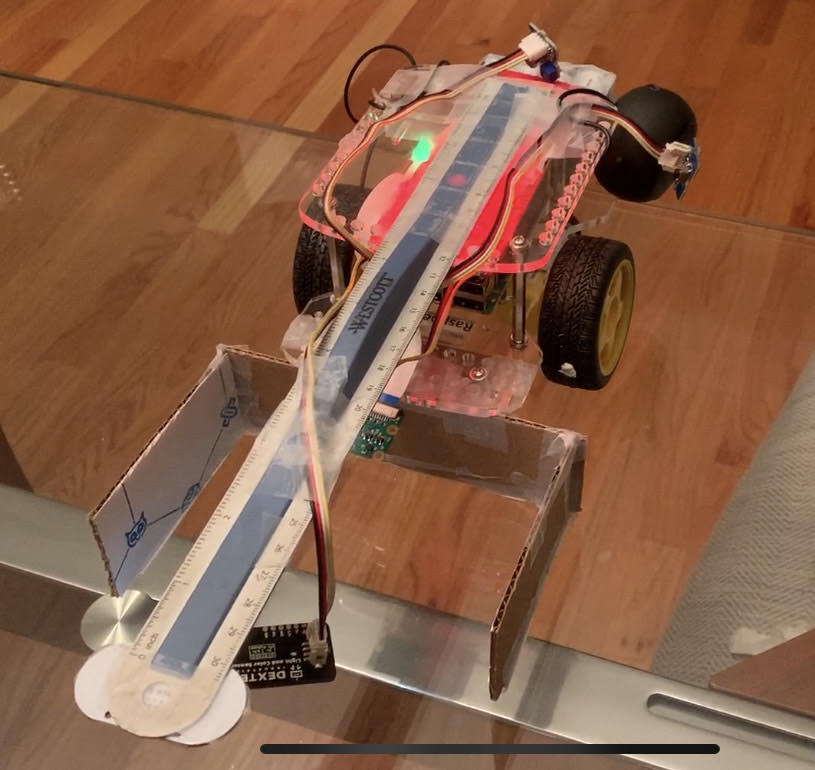
My product, Sweeper, is a robot programmed to clean tables from crumbs, tiny papers, wrappers, etc.
Eddie
Sweeper has many parts that aid it in sweeping and clearing tables efficiently. First, the sweeper’s motors are programmed to maneuver it around tables. To collect trash, the robot is modified with a small grabber to collect anything as it moves. Also, the distance sensor prevents the robot from falling off the table while moving. Most importantly, the robot’s color sensor determines when the robot pushes the trash into the trash disposal. The robot will not always collect all the trash, but it is guaranteed to collect 95% of trash. In the future, I will make improvements to trash collecting efficiency and turning.
What is stopping it from picking up a glass cup and tossing it off the table?
Sorry, my robot does not promote violence. – Eddie
Oh,i always have a mess near my laptop.I think it is very useful 😉
Yes, I think this would be very useful in the future – Eddie
Hi Eddie! Great concept, I’m so impressed the robot can function on a glass table! Did that present any challenges for the sensor? It seems like from the way you programmed it, the robot could work on any size of table, what a great feature!
Thank you!! I am glad that you enjoyed it. It seems like the only challenge in this project was turning 90 degrees. – Eddie
I really like your incorporation of the color sensor to keep it from falling off the table. Great project!
Thanks, I appreciate your positive feedback. – Eddie
This is really cool! I like that you used a glass table to demo your robot since I would imagine a glass table would probably provide more difficulty than a wooden one. I wonder if you could potentially incorporate the gyro sensor to help it move in a straight line. Did you notice and drift while working with the robot that caused it to stray away from its’ path?
Yes, the drifting was a major error that I had encountered during testing. – Eddie
This is a really useful idea in the real world where there are crumbs. Can the distance sensor see the glass well?
Yes, I had specifically chosen a glass table just to demonstrate how great the distance sensor is. – Eddie
This is really cool. I was impressed at how you were able to get the robot to find and throw away the trash.
Thanks, I’m glad you enjoyed it. – Eddie
Super impressed with how the robot was able to not only find the bag, but safely dispose of the trash into the bag. Amazing job!
Thanks, I appreciate your feedback – Eddie
It was really impressive that it was able to navigate and stay on a glass table. Finding the trash can and dumping it was an extra bonus.
–Ian
Thanks, I am glad you enjoyed this – Eddie
This is a helpful idea to keeping my space clean. I was really impressed with how you were able to locate the garbage disposal with the use of a color sensor. That addition makes it so easy to use.
Thanks, I was going for a prototype that would be easy for an anyone to use – Eddie
I really like the execution of this project. Have there been occasions where the robot was unable to detect the floor below or failed to pick up trash and if so how did you overcome that?
Thanks, fortunately, there were no problems with picking up trash and putting the trash in the trash can. However, one major error I had was the turning of the robot. In the future, I will come back to improve on the turning, so the robot could work on any table. – Eddie