Project Falcon: Item retrieval bot
Project Falcon: Item retrieval bot
The control chooses a container and the robot brings it to a designated location
James
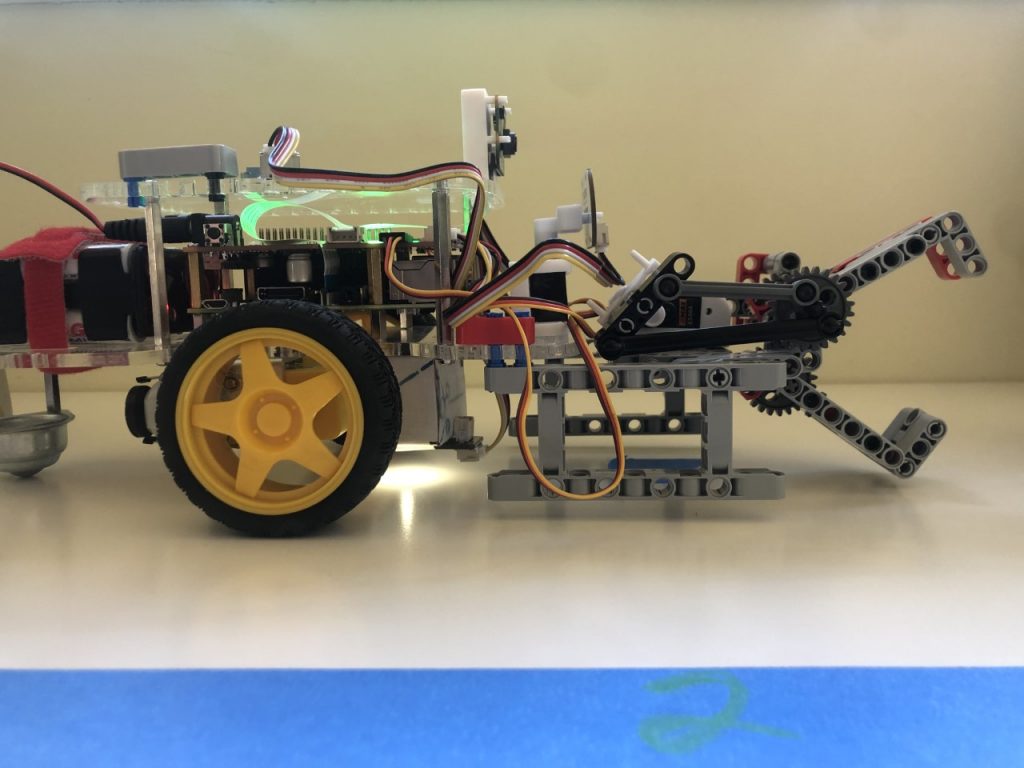
The goal of the project was to design a robot that could move a container in a similar way to modern warehouse robots. The robot’s mechanisms are powered by the two main motors which are connected to the wheels as well as the servos which operate the claw and distance sensor. The robot uses a camera and two sensors to navigate. The color sensor tells the robot when it has reached the container. The distance sensor helps the robot grab the container and avoid crashing in the event of an error. The camera uses software to isolate the balls behind each container so that the robot can will always be able to line up with the container. The use of sensors and camera are important because they help correct the robot along the way greatly reducing the possibility of failure.




Very cool! Nice gripper design. Also, putting eyeballs on your robot is ALWAYS a good idea. 🙂
Love your grabber attachment!
Love the claw design! Super cool how you used gears!
the claw’s design is really interesting, nice work!
The claw is super cool, and I like how you used the distance sensor.
The gripper claw has a cool and effective design.
The grabber was super impressive!!
the claw mechanism is a very impressive and effective design.
I like how you used the legos with the servo to pick things up. Using the different sensors was also really cool.
It is so neat how you used the balls to do localization (knowing where the robot is located). GReat work! (also nice grabber!)
Impressive mechanical engineering on that grabber. It worked really impressively. Clearly you have some LEGO experience.
I really like the grabber!
The claw design is awsome and so is all of the locating features that you’ve included, makes it seem extremely reliable
I think it was super cool how you were able to align the robot perfectly with the endzone.
Love the grabber! Nice Work!
Very nice and impressive!
A contender for the champion of the ball retrieval bots! I think a tournament of sorts is in order
Impressive grabber! I’m curious as to how much of a load it can pick up before it tips.
Really cool how you used legos
I like how much technic pieces you used
The use of legos was cool especially the claw
nice, looks like its very well built. very good claw
Great claw design