Juan Car-los
Juan Car-los
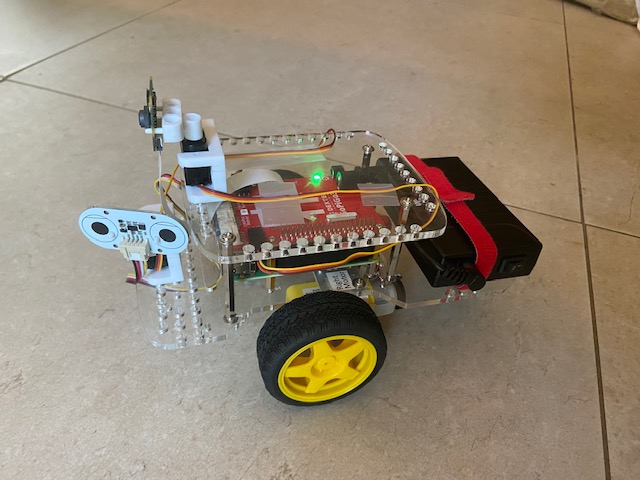
Simple self driving robot.
Mauricio
My project is a simple self-driving robot that reacts to items in proximity. The robot (Juan) goes around a track with the distance sensor facing to the inside of the track (left). The distance sensor is able to read the distance between the robot and the inside wall and reacts depending how close or far away it is. If the robot is in a perfect distance (10-15cm) it’ll keep going forward, if it’s too far away (16 or >) it’ll turn left, and if it’s too close (9 or <) it’ll turn right.

What other sensors could you add to give your car additional decision making factors/the ability to add more functionality?
could you make this robot turn both left and right with this one sensor?
I like the name, it looks like a smooth motion too, which is great. Good work! Are you using proportional control?
Great name! It moves so precisely.
I love your confidence in the robot.
I like how it gives some allowances for turning, as it is hard to turn on the spot while smoothly following the line. Good job!