Mini Rover
Mini Rover
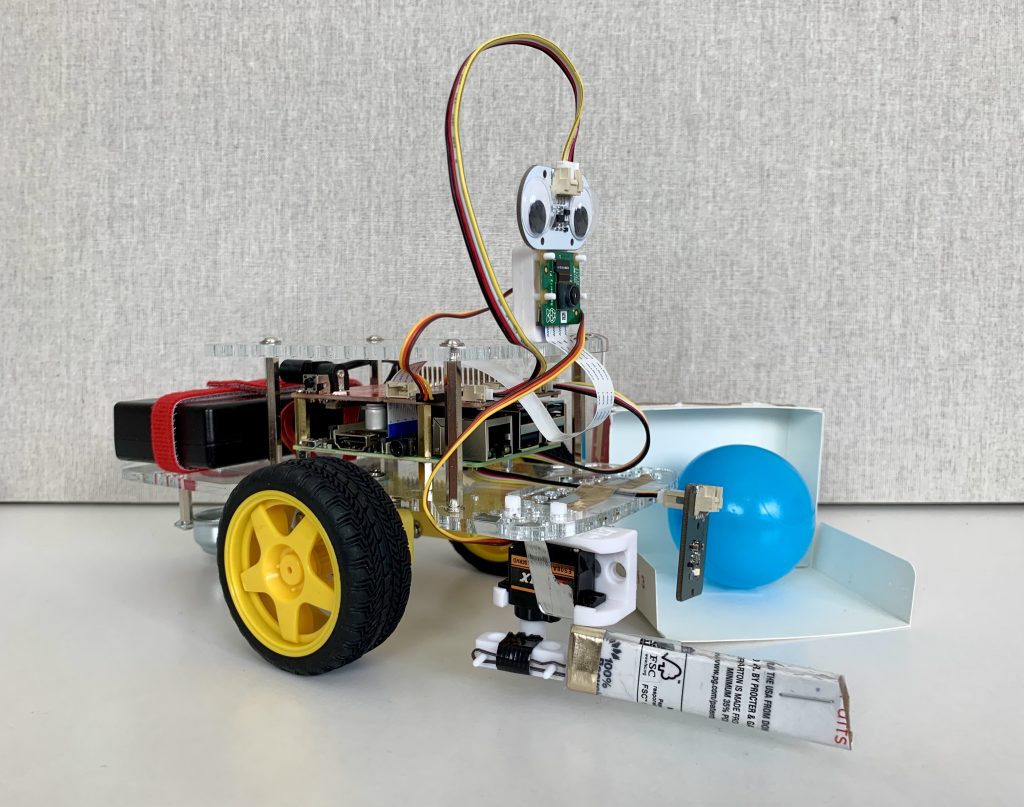
A mini distance and color sensing autonomous sampling rover.
Annie
Mini Rover mimics some of the functions seen in planetary surface exploration devices such as the Mars rovers. Mini Rover is equipped with a distance sensor that allows it to avoid colliding with obstacles and grants it the ability to operate in rocky environments. With a forward facing color sensor, Mini Rover is also able to scan objects and collect samples with its automated scooper arm.

I love how many actions this rover can perform! When you collect the blue ball, which sensors are used?
I like how you managed to use almost all the modules in the kit (motors and the sensors). I imagine that this is using the finite states “design”, changing from a “driving state” to a “grabbing state”, right? You could also include a “mapping” function that stores where the obstacles are.
That grabber seems so fast and efficient in the video! Nice design
This robot does a great job utilizing all of the motors and sensors we had. The use of the servo to collect the colored balls is incredibly clever.
Were you inspired by rovers looking for water on Mars when deciding to make the rover search for blue things, or was that just a coincidence? Either way, this is really cool!
I love this little rover! I find the mars rovers fascinating and I love how you drew inspiration from it to create your project. Did you implement any way for it to talk to mission control when it finds something or sees an obstacle?
The mechanism for the scooper is something I hadn’t though of, I love the design