Soccer Goalie
Soccer Goalie
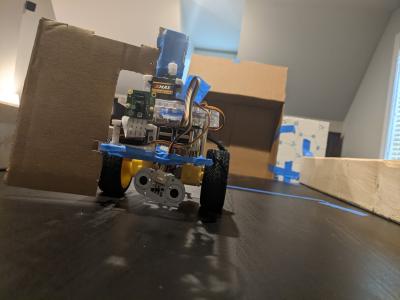
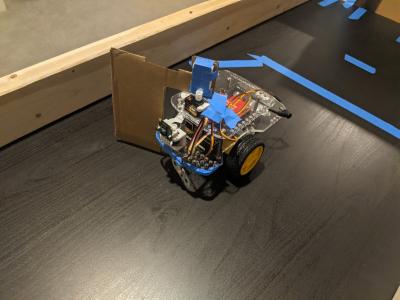
The Robot will track a ball and defend the goal
Will
This robot works by using the camera on the front of the robot to detect where the ball is. It then adjust its angle accordingly and lines up with the ball. After it is done adjusting to its position the servo on the top will rotate the hitter left or right depending on which direction the ball turned or how far it turned. Once the robot detects the ball is close, it will rotate the hitter once again and swipe the ball back to the player

Nice! How fast can the robot adjust – does the ball need to be rolled really slowly or can it defend against hard hit shots?
This is really cool! I love how you created a field for this project and it seems like your robot reacts really fast.