Owen’s Self Driving Car
Owen’s Self Driving Car
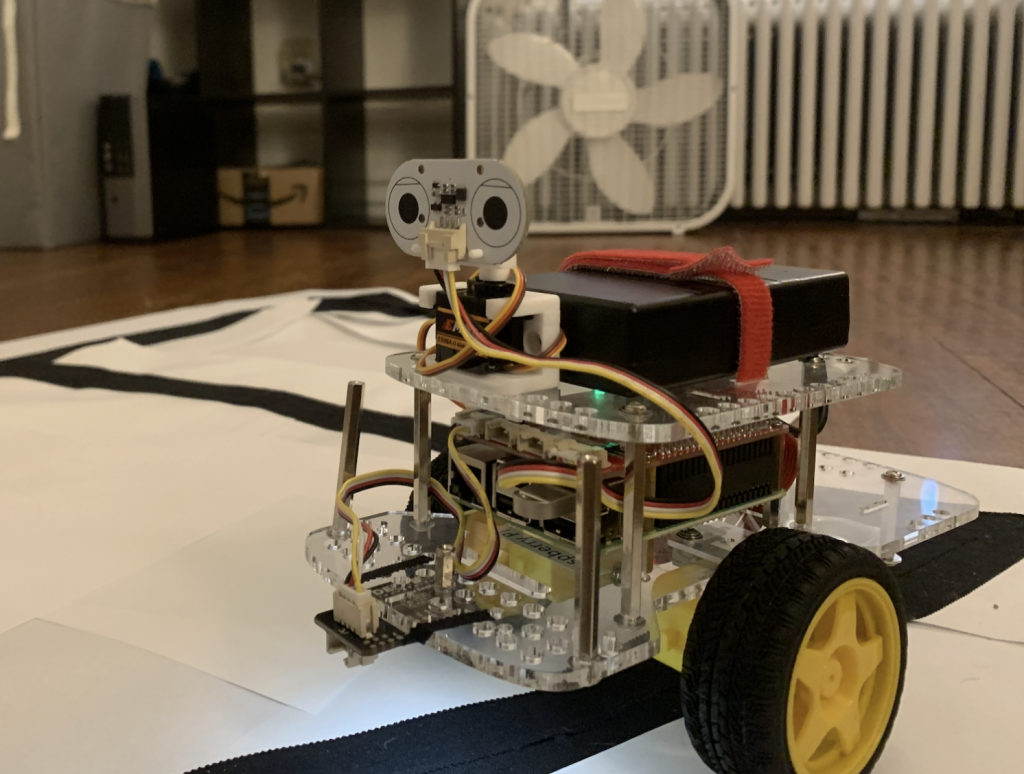
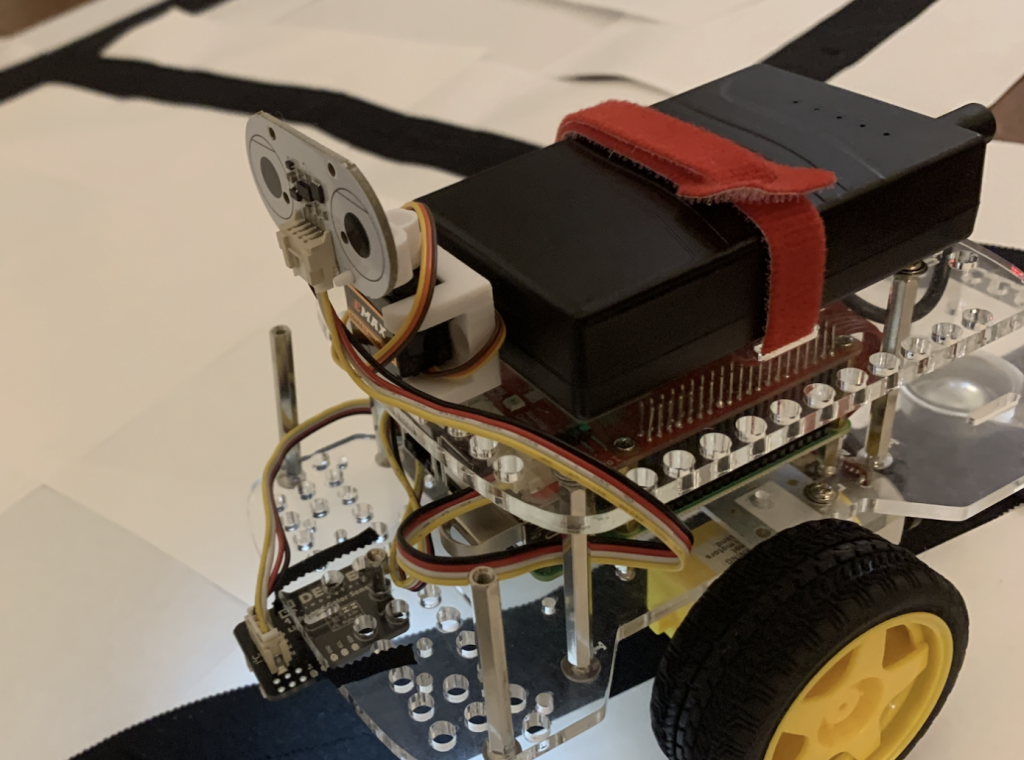
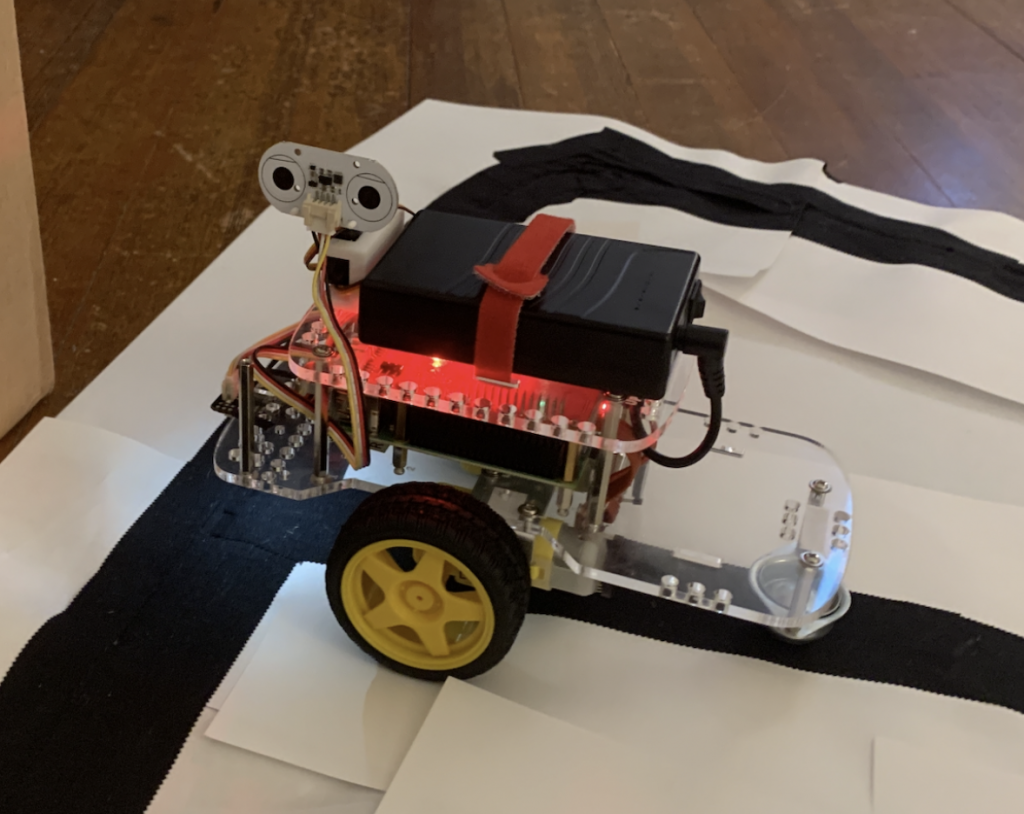
My project is a self driving car that will navigate through a network of black lines and stop signs
Owen
In my final project, I tried to create a self-driving car that mimicked those that can be found on the roads. By doing this I saw how different sensors can be used to create safer cars. Some of these safety features include automatic brakes that would stop the robot if it got too close to something and a feature that allows the robot to follow a black line which is very similar to lane assist. Because my robot doesn’t have anyone to make decisions for it, it needs to make choices for itself. At traffic stops, my car does this by looking both ways and seeing which way is free to go, and from there either turns left, right or spins 180 degrees.