Gold Team 2019
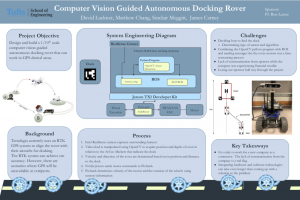
Computer Vision Guided Autonomous Docking Rover
Terrafugia’s TF2 flight vehicle must autonomously dock with an autonomous ground vehicle (AGV) on the landing site. Autonomous docking of the flight vehicle increases safety on the vertiport, lowers turn around time, and saves money. An RTK GPS system can be used to navigate an AGV to within cm accuracy of the dock. However, there are scenarios where GPS may be unavailable at vertiports. Under these circumstances, the AGV will require a redundant system to dock and undock with the TF-2. Our 1/10th scale Traxxas RC car utilizes an Intel Realsense Stereo Camera, ArUco markers, and computer vision algorithms from OpenCV to locate the dock. The video feed is processed in real-time by a Nvidia Jetson TX1, which sends velocity commands through a flight controller to guide the rover.
Related Tech Notes
- Stereoscopic Cameras in Autonomous Vehicle Navigation by David Lackner
- A* Algorithm and Other Path Planning Algorithms by Matthew Chang
Gold Project Poster