by Dr. Ethan Danahy, Research Assistant Professor, CEEO
During the interim break between the Fall 2016 semester and the start of the Spring 2017 semester, the Center for Engineering Education and Outreach (CEEO) at Tufts University hosted its first ever “Winternship,” an opportunity for students staying local over winter break to spend the first two weeks of January working on CEEO-related technology development initiatives. A total of 14 undergraduates from Tufts University, Wellesley College, UMass Amherst, and Stonehill College participated, starting the Winternship with an orientation learning about LEGO Robotics and Laser Cutting, and then transitioning to working on several research projects, each sponsored by a different Tufts University grad student, staff member, or professor in connection with ongoing research and development initiatives at the University.
Here are brief overviews of the different projects that happened during the 2017 Winternship (January 3rd to January 13th). For any questions about the individual projects, or the Winternship opportunity itself, please contact Professor Ethan Danahy from the Tufts University Center for Engineering Education and Outreach (CEEO) at ethan.danahy@tufts.edu.

Project: Documentation Station
Students: Ashwin Swar (Tufts University, Class of 2020), David Ngetich (Tufts University, Class of 2020), Fiona Chung (Wellesley College, Class of 2018), Ryan Duyon (Stonehill College, Class of 2019)
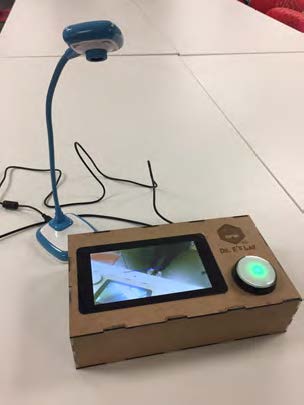
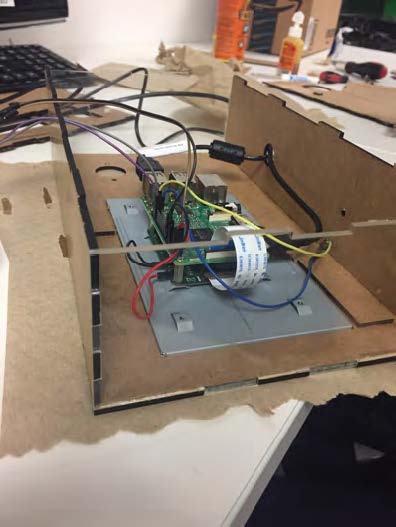
Description: Continuing the master’s thesis work of Susan Bitetti from Fall 2016 (“The Development and Implementation of a Tool for Encouraging the Practice of Student-Driven Documentation in Engineering Design”), this project focused on expanding the functionality of the physical documentation station and creating a more stable housing for the device. On the software side, the focus was improving the in-class setup process of the tool to be as easy as possible (and targeting non-technical users by removing any need to change code or issue command line functions) in addition to adding new features to make the program run more smoothly and provide a better interactive experience. On the hardware side, to accommodate new electronics, a better fitting box was designed and laser cut to house the documentation station equipment, including a new touch screen and illuminated button.
Project: Skill Training Robot
Students: Michael Edegware (Tufts University, Class of 2019), Colin Kennedy (UMass Amherst, Class of 2019)
Description: The goal of this project was to create an interactive robot that could be used to assist children with developing everyday skills around simple, multi-part tasks, such as setting the table. Once finished, this system will be used in a research study of children on the autism spectrum, to evaluate the effect of such a support in helping guide them through these types of activities. The version created uses the LEGO MINDSTORMS robotics system as a base and an Android tablet as a large screen for displaying tasks/steps as well as emotional feedback. The whole system is controlled by an Android app that runs on a phone (to be used by the researcher controlling the experience). The system is built in such a way that the steps, responses, and functionality can be customized based on the particular task being researched.


Project: MakerGames Clock
Students: Renee Huang (Wellesley College, Class of 2018), Lisa Truong (Wellesley College, Class of 2017), Rabia (Tufts University, Class of 2020)
Description: For helping student groups maintain track of allocated time during making activities (and specifically those occurring during the CEEO’s MakerGames initiative), this interactive website displays a customizable clock which can be used to track time both throughout the activity and during summary presentations. Controls associated with the clock allow the teacher to perform setup and time-management operations, while a table to the right of the clock can be used to manage various resources associated with MakerGames activities (e.g. the “MakerBucks” currency as well as other materials the individual groups might acquire).

Project: Web-based IDE for Python on the EV3
Students: Joao Marcos Basso (Tufts University, Class of 2020), Duc Nguyen (Tufts University, Class of 2020), Ahmed Gado (Tufts University, Class of 2020).
Description: While using ev3dev (a Linux-based operating system customized for the LEGO MINDSTORMS EV3) opens up the possibilities of connecting the EV3 to the Internet, running an on-brick web-server, and writing custom code in Python, there still exists technical hurdles in terms of accessing the brick remotely, creating code within the OS, and executing that code. This project aimed to solve that workflow, and make programming the EV3 in Python more accessible to a wider range of users, by creating a web-based IDE (Integrated Development Environment) that requires no software install (as it runs in browser), can write/save/execute code remotely, and provides helpful functionality (file explorer, code snippets, autocompletion, syntax highlighting, and terminal output log) within a graphical interface. While targeting the EV3, the tool was designed with flexibility in mind, and can also run on any Windows, Mac, or Linux machine, meaning the platform can eventually be deployed to a wide range of devices other than the EV3, from desktops down to Raspberry Pis.

Project: IoT Robotic Control
Students: Lucy Pavlovich (Tufts University, Class of 2020)
Description: Expanding on the default functionality of National Instruments’ myRIO platform, this project first built a robot around the embedded hardware device, then attached a camera and created an obstacle avoidance system, and finally created code to control the movement based on accelerometer data collected from a phone (tilting the phone drives the robot in a specific direction). This work is a precursor to creating an IoT (Internet of Things) Robotic Control system, where the robot is Internet-enabled and able to communicate and receive commands from anyone or anything connected to the Internet.

Project: EV3 Quickstart
Students: Ashwin Swar (Tufts University, Class of 2020), David Ngetich (Tufts University, Class of 2020)

Description: Building off the EV3 Quickstart work done at the CEEO during Summer 2016, this project debugged and refined the initial work by enhancing the EV3 Quickstart program. The program allows any user to quickly and easily get started with LEGO MINDSTORMS robotics by removing the need for any programming, as the EV3 Quickstart system has a complete set of predefined actions for any combination of inputs and output. Thus, just by plugging sensors and motors into the EV3 brick, the user can immediately start creating interesting, interactive robots with different movements and sensor responses without the need of learning or writing any code. Beyond the tasks of debugging and adding additional features, this project also created a new user guide for making it easier and more intuitive for a beginning user to understand the EV3 Quickstart system.
Project: Internet Controlled LEDs
Students: Faizan Muhammad (Tufts University, Class of 2020), Ryan Duyon (Stonehill College, Class of 2020)
Description: The default tutorial at Adafruit for a strip of LED lights is to control them locally from an Arduino. This project looked to expand on that and make the lights internet enabled and controllable from anywhere by any device. Leveraging a Sparkfun Redboard combined with a WiFi shield connected to the LEDs, custom Arduino code was written to take in external commands and an HTML interface designed and developed where users can remotely update the color of the entire strip via the web.

Project: Interactive LEGO Robots
Students: Colin Kennedy (UMass Amherst, Class of 2019), Faizan Muhammad (Tufts University, Class of 2020)
Description: Four interactive LEGO creations were developed. A Kinetic Sculpture for the CEEO’s front desk (based on public designs by Jason Allemann and Changryang Kim), two new GongBots (for automatically ringing a gong), a Reversing Trolley (an EV3 demonstration of the classic trailer/trolley controls problem, to maintain proper orientation of the system when driving backwards), and a Balancing Segway (a self-balancing, two-wheeled robot that maintains its upright position).


