Ball Sensor
Ball Sensor
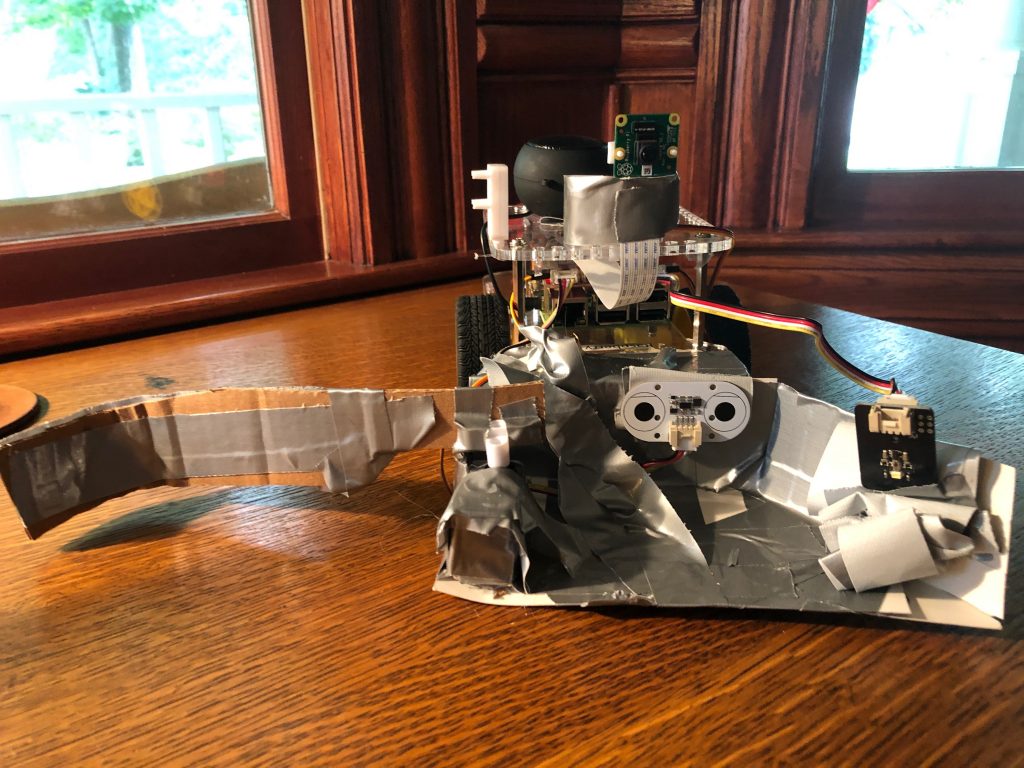
This robot senses the location and color of the ball.
Seth
The robot that I created first senses the location of the ball using the camera. Then it will drive up to the ball and using its claw, it will guide the ball into the scoop. Using the light sensor, the robot will detect the color of the ball and send a signal to the lights. The lights will turn on to the color that was detected and the speaker will say “the color of the ball is ___.” Then the robot will turn around, find where I am standing, and come back.



Plays fetch and identifies the ball correctly, while great on its own, I see very good synergy with some of the other robots.
I like how the robot identifies the color and then turns the LED’s that color!
The claw worked really well, great job!
Really cool attachments!
I really like how how the robot would return to you after getting the ball, nice job!
The grabbing mechanism was really cool!
Great idea for the grabbing mechanism
I like the grabber a lot! And I think its very interesting
Interesting grabber
nice grabber
Great use of materials and the grabbing mechanism works great
The grabbing mechanism and ball detection method are both very impressive, and the improvisation of materials is really creative. Nice job!
Great design!