UAVs in the Military
Abstract
This article investigates technologies that have allowed for the increased presence of unmanned aerial vehicles in the US Military. A focus on imaging systems, embedded processing platforms, and system architecture/protocols will highlight the significance of UAVs’ technological prowess and reveal the challenges facing further development. These issues include drone interoperability with existing military systems, as well as hardware and software security. Through an analysis of defense reports and emerging technologies, future drone usage and capabilities will be predicted.
Introduction
Unmanned aerial vehicles, or UAVs, describe a type of aircraft with no pilot. Instead of pilots, onboard computers are responsible for flight control. This ability to function autonomously has led to a massive expansion of the UAV industry, from hobbyist aircraft to military aircraft. Due to its strategic benefits, UAV technology has developed most rapidly in the US military. At the forefront of these advancements lies Electrical and Computer Engineering (ECE), where cutting-edge technology continues to push the boundary of UAV capabilities.
A recent US defense and security report released by Business Monitor International highlights this surge of increasing UAV production. In projected defense expenditures for 2015, the US reported a $30 billion increase from the 2014 defense budget.5 This increased budget includes a $114.2 million contract with Northrop Grumman for the acquisition of 66 RQ-4B Global Hawk UAVs. In addition, the Air Force plans to acquire up to 288 MQ-9 Reaper UAVs for close air support. These stats reinforce the military’s “focus on unmanned aerial vehicles and command, control, communication, intelligence, surveillance and reconnaissance”.5
The question then arises: why unmanned aerial vehicles? To be sure, UAV capabilities do not essentially differ from the capabilities of manned aerial vehicles. While some technologies have been customized for different platforms, one or many piloted aircraft can perform operations that a UAV can perform. The benefit, as explained by the Department of Defense (DoD), is that “unmanned systems provide persistence, versatility, survivability, and reduced risk to human life”.6 With some models boasting a maximum flight time of over 34 hours, UAVs can supply continuous intelligence, surveillance, and reconnaissance (ISR) while removing pilots from exposure. These aircraft act as an alternative in missions that are exceedingly dangerous or mundane for traditional pilots – thus allowing for more effective allocation of military resources.
The US employs UAVs throughout the military, with five groups that separate the aircraft based on performance, payload, and size.6 These groups range from UAVs that can be carried in a backpack and launched by hand, to UAVs that weigh upwards of seven tons with a maximum altitude of 60,000ft. On the smaller end of the spectrum, in Group 1, lies the RQ-20 Puma UAV. With a wingspan of 9.2ft and a range of 15km, the Puma is typically provided to infantry units in the army for small-scale ISR gathering and targeting.8 Group 3 encompasses mid-size UAVs including the RQ-7 Shadow. This aircraft is characterized by its ability to provide larger-scale tactical support with a range of 109km and endurance of 9hrs.9 UAVs are also used in maritime settings, as is true of the MQ-8B Fire Scout. As one of the few helicopter UAVs, the Fire Scout is able to take off and land vertically, allowing it to operate from aircraft carriers and other navy vessels.10
For the purpose of investigating the role of ECE in UAV technology, this paper will focus on Northrop Grumman’s RQ-4 Global Hawk. As described by the US Air Force, the RQ-4 contains “an integrated sensor suite that provides global all-weather, day or night ISR capabilities.”7 The aircraft’s maximum flight time (32hrs) and altitude (60,000ft) is paralleled by the Lockheed Martin U-2 spyplane, an aircraft made famous by its intelligence-gathering role in the Cold War. Originally deployed in 2001, the RQ-4 has since undergone several changes to reflect the advancement in sensors and communication technology.
7 When discussing UAVs in the military, it is important to realize their context in a more general unmanned aircraft system (UAS) and the role it plays in an intelligence-gathering scenario (see Figure 1). In the case of the RQ-4, the UAS consists of three elements: a Launch and Recovery Element (LRE), Mission Control Element (MCE), and a UAV. The LRE is responsible for flying the UAV as it travels to and from an area of interest. The MCE assumes control when the UAV reaches the area of interest, and includes a pilot and a sensor operator. The UAV houses numerous sensor, communication, and navigation technologies that stream information back to the MCE. The non-UAV components of this system are integral to the sharing of data gathered by the UAV to other assets. For example, in 2014, the RQ-4 was deployed over the Philippines in response to Typhoon Haiyan. It collected over 1,000 images that were relayed to the MCE, then to relief personnel on the ground.
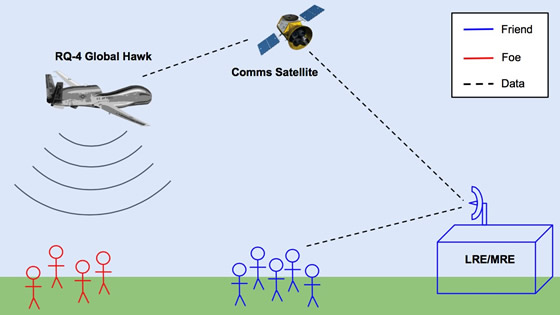
Figure 1
Enabling ECE Technologies
The RQ-4 contains a massive number of technological developments, from novel airframe design to a powerful turbine engine. The secretive nature of some of the aircraft’s specifications prevents a thorough description of each technology. However, enough information is provided to allow a window into the engineering behind the RQ-4. What follows is a selection of the most prominent ECE-related technology onboard the aircraft.
Enhanced Integrated Sensor Suite (EISS)
One of the most powerful systems onboard the RQ-4 is an imaging sensor suite. Comprised of several technologies including an electro-optical (EO) camera, infrared (IR) sensor, synthetic aperture radar (SAR), and ground moving target indicator (GMTI), the suite is responsible for capturing and conditioning ISR data.
Electro-Optical/Infrared Sensors
13 EO cameras and IR sensors are receptive to a range of frequencies on the electromagnetic spectrum, allowing for thermal and visible light imaging. Data from EO cameras is displayed to sensor operators in the form of high definition video, as one might observe video shot with a common digital camera. Airborne EO cameras differ from common digital cameras in their increased resolution, zoom, and stability. Because most targets are thousands of feet from the aircraft, image resolution and zoom must be sufficient to identify differences in target appearance. This increased target range also necessitates image stabilization, as camera motion due to turbulence results in erratic recording. Gyroscopes and gimbals are used to reduce motion-induced error, and have evolved to allow for the housing of multiple imaging sensors within one gimbal-mounted optical system. Included in this system is an IR sensor, which records data for a range of electromagnetic frequencies below visible light. Thermal radiation is emitted in this frequency range, allowing IR sensors to capture useful images in low-visibility conditions.
Synthetic Aperture Radar
13 SAR is a technique used to gather images from radar range information. At a fundamental level, radar determines the range of an object by transmitting an electromagnetic pulse and measuring the time it takes to receive the pulse after it is reflected by the object. SAR images are formed by combining a series of these pulses as an aircraft flies over an area of land. The RQ-4 has advanced upon traditional SAR to offer increased resolution and multiple modes through the use of active electronically scanned array (AESA) technology. AESA utilizes multiple transmit and receive elements to control the size and direction of the radar’s beam, and allows for spot and swath SAR modes. In spot mode, SAR is used to image a smaller, predefined area of land at higher resolution. In swath mode, SAR images a larger area of land at lower resolution. Perhaps the most important feature of SAR is the ability to penetrate through cloud cover, which enhances the persistence of surveillance data.
Ground Moving Target Indicator
14 In addition to SAR images, AESA technology allows for GMTI. As stated by Northrop Grumman, the manufacturers of the RQ-4, GMTI is “essential to the U.S. battlefield information advantage, because it can depict vehicular movement of enemy forces in near-real time throughout a large area, regardless of weather”. GMTI technology functions similarly to weather radars in that it tracks the Doppler signature of moving objects. This Doppler effect is characterized by a frequency change in a reflected radar pulse, and it is caused by the motion of a radar-reflecting object relative to the radar itself. The audible Doppler effect is commonly observed when an emergency vehicle passes by and the tone of the siren changes. The information provided by GMTI is in the form of a digital map with dots representing moving vehicles.
Battlefield Airborne Communications Node (BACN)
11 The Battlefield Airborne Communications Node (BACN) is a critical element to the Global Hawk UAS, capable of transmitting and receiving a variety of signals in real time. BACN manufacturer Northrop Grumman describes the system as “a persistent gateway in the sky that receives, bridges, and distributes information among all participants in a battle.” Developed as part of an initiative to increase interoperability and communications performance in unfavorable terrain, the node has three crucial characteristics. BACN is radio agnostic, meaning it is compatible with a number of communication devices and protocols. Secondly, it is platform agnostic, or able to mount to various aircraft. Lastly, it is untethered, allowing for movement within a battlespace with uncompromised functionality. BACN’s versatility highlights the US military’s trend of increasing modularity and situation awareness.
Flight Control
16 Central to the RQ-4’s flight control are two integrated mission management computers (IMMC). These computers are responsible for integrating data from sensors including the global positioning system (GPS), inertial measurement unit (IMU), and altimeter, and controlling flight-critical subsystems such as the the engine and power. Data from the GPS and IMU is filtered to provide positional information. This aiding manual piloting or helps to determine maneuvers necessary to maintain a predefined flight path. Characterized by advanced input/output (I/O) capability and flight control algorithm redundancy, IMMCs allow for the autonomous functionality of the RQ-4.
Self-Protection Suite
12 The RQ-4 employs several self-protection systems to detect and avoid attacks. Included in the suite is a radar warning receiver, laser warning receiver, and towed decoy system. Radar warning receivers help to provide signal intelligence (SIGINT) by detecting the presence of foreign radar signals that may be tracking or targeting the aircraft. This system highlights the importance of SIGINT capabilities and the increased focus in modern ECE applications. Laser warning receivers detect the presence of laser-guided missile systems and can use the trajectory of the laser to position its point of origin. Detection systems can then trigger countermeasures such as a towed decoy system. As implied in the name, airborne decoys are deployed in the wake of the aircraft to lure guided missiles from the aircraft.
Challenges and Future Trends
The future of the UAV is shaped by today’s technological challenges. In a document released in 2013 titled “Unmanned Systems Integrated Roadmap,” the DoD addresses these challenges and predicts future trends through the year 2038. Overarching themes include increasing interoperability, capability, and sustainment. What follows is a selection of the most pertinent issues from the document and their impact on future UAV development.
Data Protection
6 The security of UAS data transmission depends upon encryption, and security protocols differ depending upon the type of transmission. From unclassified to classified, command and control (C2) communication to image relay, encryption standards must be tailored to the information being protected. These standards often have lengthy development cycles and are not flexible across many platforms. The DoD states that “future encryption solutions will contain products that have a quicker time to market, greater coalition interoperability, and improved key management.” [6] Key management refers to the ability to encrypt and decrypt communication, and represents a difficult problem as information is increasingly shared between separate military assets. For instance, an image transfer between a MCE and UAV may have a complicated encryption standard that makes sharing images to ground troops difficult, as troops may not have the same computational resources required for decryption. This has led to a push for hardware encryption modules that can be deployed across multiple platforms and increase data rates. UAVs’ ability to distribute secure data is vital to their military impact.
Autonomous Decision Making
6 As demonstrated in the description of the RQ-4 UAS, UAVs have multiple elements required for functionality. While the RQ-4 can operate autonomously, it must be pre-programmed for specific flight paths and operations. Human operators remain a vital part of the UAV control loop, from establishing regions of interest to controlling sensors. While this represents a significant advantage over traditionally piloted aircraft, technological advancements can be made to increase the autonomous intelligence of UAVs. Rather than executing mission plans, the DoD envisions developing decision-making algorithms that allow UAVs to dynamically redefine mission plans in order to complete mission objectives. For example, consider a mission where an RQ-4 is deployed to image a region where hostile forces are known to reside. As the aircraft approaches the region of interest, GMTI data reveals that the target has moved from the region. This triggers the RQ-4 to define a new flight path, integrating GMTI data to track the target. This ability would achieve significant manpower savings, as one pilot could control multiple UAVs with little input. Its development, however, necessitates additional sensors to provide increased situational awareness and ease the reliance upon GPS. If UAVs are to function autonomously, they must have highly accurate positioning and navigation – even in GPS-denied environments.
Signal Processing
17 The rapid advancement of compute resources such as processing, memory, and power, has led to improvements in UAV signal processing. While the first RQ-4 contained nearly 40 embedded computer boards, the latest models have less than 20. As more detailed sensors are added to UAVs, increasing amounts of data must be conditioned for transmission to other military assets. This transmission is limited by the bandwidth of data links, so it is imperative that only useful data is transmitted and it is as compressed as possible. To address this, new processing methods and hardware approaches have been developed specifically for UAV sensor data conditioning. 18 Parallelization, a technique in which a signal processing task is divided across multiple computers, has allowed for heightened efficiency as well as the use of the same data for multiple functions. Field programmable gate arrays (FPGAs) have also increased processing abilities, with greater performance over existing signal processors and customizable hardware architecture. The primary goal of signal processing onboard UAVs is to extract information from data gathered by sensors and transmit it as effectively as possible. Not all data provides new information; the challenge lies in determining what data has significance.
Sustainment Planning
6 Accelerated technological growth can be accompanied by hasty planning. Sustaining the development of UAVs includes planning to ensure compatibility and interoperability. As the demand for capabilities increases, the task of integrating devices becomes a complicated issue. In the wake of the 9/11 terrorist attacks, UAV production and deployment programs suffered from stovepiping – a term describing the proprietary nature of technology that prevents information dissemination and interoperability. The military has struggled with this planning, and has identified that “future development of unmanned system platforms… must be guided by open standards and interfaces to enable interoperability and efficiently utilize limited resources.”
Conclusion
Through an analysis of enabling technologies onboard the RQ-4 Global Hawk, it is apparent that ECE plays a vital role in military UAVs. The introduction of advanced sensors, flight controllers, data processors, and communications has increased battlefield capability but also introduced significant issues to engineers. Future trends of military UAV usage reveal extraordinary functionality that will require thoughtful planning and implementation. The next steps in development will be taken with careful consideration of interoperability, sustainability, and security. While military UAV potential is vast, the road ahead is long and challenging.
Bibliography
- [1] Constantinides, C.; Parkinson, P. (2008) Security challenges in UAV development. Digital Avionics Systems Conference, IEEE/AIAA 27th, vol., no., pp.1.C.1-1,1.C.1-8. DOI: 10.1109/DASC.2008.4702757
- [2] El-Sayed, A.; ElHelw, M. (2012) Distributed component-based framework for Unmanned Air Vehicle systems. Information and Automation (ICIA), International Conference on , vol., no., pp.45,50, 6-8. DOI: 10.1109/ICInfA.2012.6246780
- [3] Mohamed, N.; Al-Jaroodi, J. (2014) Service-oriented middleware for collaborative UAVs. Information Reuse and Integration (IRI), IEEE 14th International Conference on , vol., no., pp.185,192. DOI: 10.1109/IRI.2013.6642471
- [4] Sullivan, J.M. (2005) Revolution or evolution? The rise of the UAVs. Weapons and Wires:Prevention and Safety in a Time of Fear, International Symposium on, vol., no., pp.94, 101. DOI: 10.1109/ISTAS.2005.1452718
- [5] United states defence & security report – Q1 2015. (2015). London: Business Monitor
International. Retrieved from ProQuest SciTech Collection database. - [6] U.S. Department of Defense (2013, January 1). Unmanned Systems Integrated Roadmap. Retrieved from http://www.defense.gov/pubs/DOD-USRM-2013.pdf
- [7] U.S. Air Force. (2014, January 1). RQ-4 Global Hawk. Retrieved from http://www.af.mil/AboutUs/FactSheets/Display/tabid/224/Article/104516/rq-4-global-hawk.aspx
- [8] AeroVironment. (2015, January 1). RQ-20 Puma. Retrieved from http://www.avinc.com/downloads/DS_Puma_Online_10112013.pdf
- [9] Textron Systems. (2014, January 1). RQ-7 Shadow. Retrieved from http://www.textronsystems.com/products/unmanned/shadow
- [10] Northrop Grumman. (2015, January 1). MQ-8B Fire Scout. Retrieved from http://www.northropgrumman.com/Capabilities/FireScout/Documents/pageDocuments/MQ-8B_Fire_Scout_Data_Sheet.pdf
- [11] Northrop Grumman. (2015, January 1). BACN. Retrieved from http://www.northropgrumman.com/Capabilities/BACN/Pages/default.aspx
- [12] Airforce-Technology. (2015, January 1). RQ-4A/B Global Hawk HALE Reconnaissance UAV, United States of America. Retrieved March from http://www.airforce-technology.com/projects/rq4-global-hawk-uav/
- [13] Raytheon. (2015, January 1). Multi-Spectral Targeting System. Retrieved from http://www.raytheon.com/media/sas/mts/
- [14] Northrop Grumman. (2015, January 1). RQ-4 Block 40 Global Hawk. Retrieved from http://www.northropgrumman.com/Capabilities/GlobalHawk/Documents/Datasheet_GH_Block_40.pdf
- [15] Northrop Grumman. (2004, February 1). Ground Moving Target Indicator Radar And the Transformation of U.S. Warfighting. Retrieved from http://www.northropgrumman.com/Capabilities/MPRTIP/Documents/gmti.pdf
- [16] Curtiss-Wright. (2011, January 1). Flight Control Computers. Retrieved from http://www.cwcdefense.com/products/subsystems/program-specific-subsystems/flightcontrol.html
- [17] Cots Journal. (2007, May 1). UAV Signal Processing Payloads Push Compute Density Curves. Retrieved from http://www.cotsjournalonline.com/articles/view/100662
- [18] Xu Junyi; Wang Xiutan; Peng Yingning, "Realization of an airborne radar parallel signal processing system," Radar, 2001 CIE International Conference on, Proceedings , vol., no., pp.792,795, 2001 DOI: 10.1109/ICR.2001.984832
Suggested Reading
- http://www.textronsystems.com/products/unmanned/shadow
- http://www.avinc.com/uas/small_uas/puma/
- http://www.northropgrumman.com/Capabilities/FireScout/Documents/pageDocuments/MQ-8B_Fire_Scout_Data_Sheet.pdf
- http://www.spyflight.co.uk/global%20hawk.htm
- http://www.airforce-technology.com/projects/rq4-global-hawk-uav/