Dipeshwor Man Shrestha

Dipeshwor Man Shrestha
Doctoral Student
dipeshwor.shrestha@tufts.edu
dipeshwor@karkhana.asia
Research Interests
Play,
Making
Educational Robotics,
Remote Learning
In her Financial Times article, Roy (2020) mentions:
“Historically, pandemics have forced humans to break with the past and imagine their world anew. This one is no different. It is a portal, a gateway between one world and the next.”
Indeed, we have an opportunity to shift the focus of the current education system that privileges dominant forms of knowing/doing/being/making, values content knowledge, emphasizes tools, materials, and products, and relies primarily on written work to assess student learning, to a renewed focus on people, their relationships with each other, and their relations with social, cultural, historical, physical, and virtual spaces. Instead of longing for a return to “normality,” she invites us to reimagine any space (not just schools) as a learning space.
Initially, I was interested in exploring Play and Engineering, and how they relate to Learning. As illustrated in Figure 1, I was thinking broadly about the intersection of Play, Engineering, and Learning, and how they were connected by the Remote component, considering the changes in the current educational landscape because of the global pandemic. Although the illustration was useful in communicating my ideas with my peers and instructors, my ideas have since evolved and I have made some modifications.

In addition to that, I also drew inspiration from Marin’s (2020) illustrations to “represent ambulatory turns and sequences across walks (p. 18).” She writes:
As Mike and I drafted these representations of ambulatory turns and sequences, we were both drawing on esthetics valued in the creative process as well as principles of relationality that are commonly shared across many Indigenous communities. Mike’s artistic skills and his attention to particular visual elements, guided me in rendering something that I felt was more representative of the cultural process of learning-on-the-move… For example, the conceptual landscape captured in [the figures] were also inspired by Cajete’s(2000) work on Native Science, as well as weaving designs found across many Indigenous communities. (Marin, 2020, p. 18)


Image source: https://mandalas.life/get/sri-yantra-mandala-newari-style/
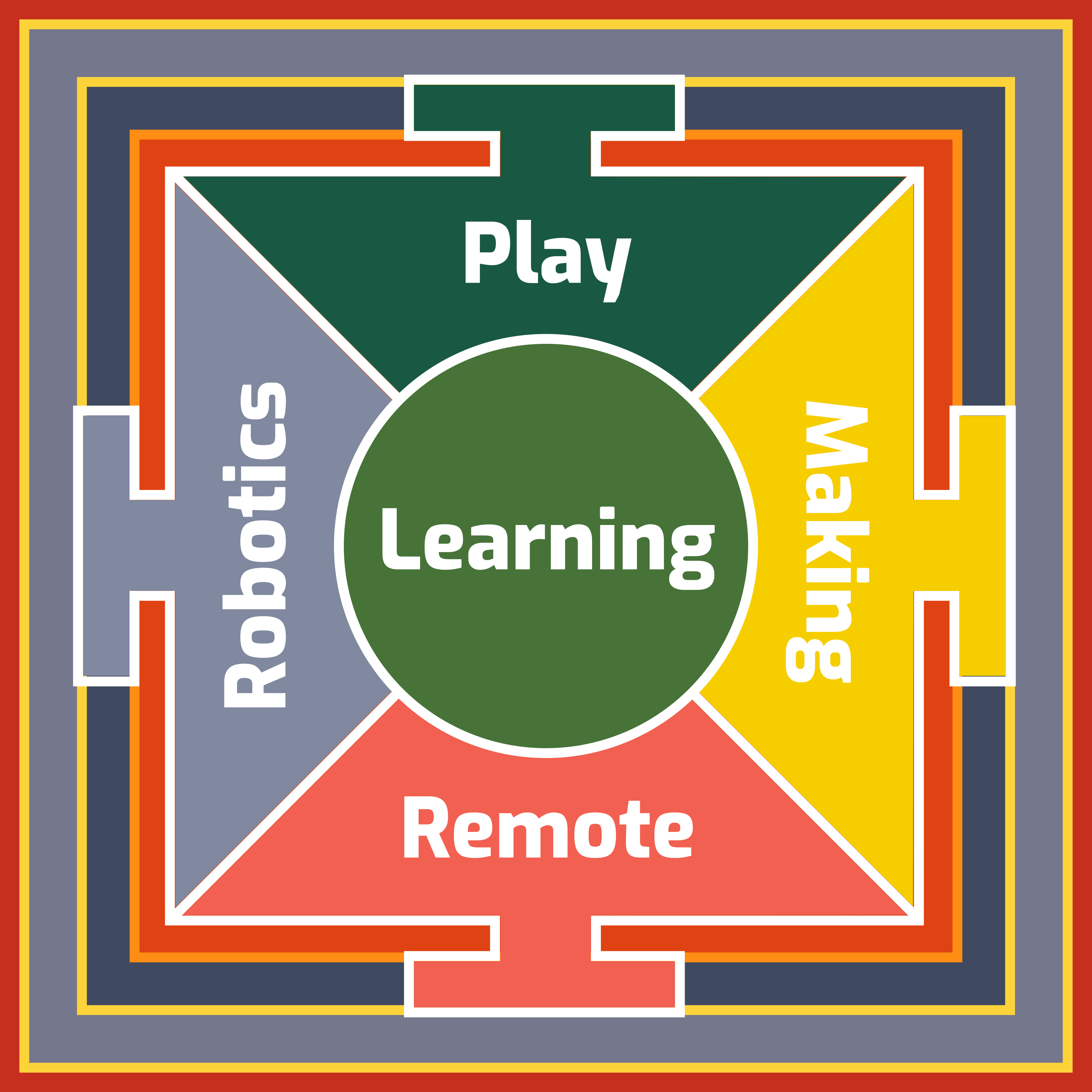
Inspired by a Newari mandala design (Figure 3), I came up with a revised illustration to depict the components of the problem space (Figure 4).

Based on feedback from my peers and instructors on the first version, it became clear that instead of thinking about Learning as a separate component, it needed to be at the bindu (power center) of the mandala design, because it encompasses all the other components. Similar to how authors like Marin do not distinguish between “walking” and “learning,” and instead conceive “walking as learning,” we can envision play as learning, making as learning, programming robots as learning, and engaging in remote explorations as learning.
Also, in the new depiction, instead of using the broader term: Engineering, I decided to use the terms: Robotics, and Making. I chose Robotics because there is inherently a large “solution diversity” to most robotics problems, and it supports a “technology-rich design-based learning environment, in which learning happens best when learners are engaged in learning by making, creating, programming, discoversing and designing their own “objects to think with” in a playful manner (Bers, 2008, p. 109).”
Similarly, I chose Making because it covers a number of different disciplines like designing, sewing, cooking, engineering, coding, craft making, hacking, repurposing, and many more. Agreeing with Vossoughi’s reminder about the perils of uncritically adopting “branded, culturally normative definitions of making (Vossoughi et al., 2016),” and how it might reinforce dominant understandings of knowing/being/doing/making, I pledge to privilege heterogeneous conceptions of making.
In addition to that, both Robotics and Making do not have a history of being taught and evaluated in a certain way (as in a formal educational setting), and hence, have the potential for transforming the current education system.
Further, I hope to explore approaches that involve multi-sensory learning experiences (involving touch, sound, sight, gestures, movements, space, etc.) in a Remote learning environment, and to experiment with different forms of collaborations and modes of interaction – through electrical or electromechanical sensors (involving color, distance, acceleration, orientation), and with human, non-human (Internet of Things, robots, codes), and more-than-human (wind, light, air, sun, water, etc.) elements, that a virtual learning environment can support. Based on my evolving ideas, I am interested in exploring the following question:
How can we support teachers remotely, and collaborate with them to co-design lesson plans and activities that engage learners through multisensory experiences?
In the linked Miro board, I have tried to expand on the different components of the above question, and attempted to examine the relationships among the different components.
Finally, I plan to start conversations with collaborators to reflect on our own roles and their associated privileges, as we co-design learning activities. In particular, in the context of Nepal, I want to be mindful of power dynamics that the language of instruction might play during facilitation, because Nepali is a hierarchical language. I think addressing this inherent hierarchy is essential because it might restrict genuine communication between teachers and students, and limit honest feedback, while retaining dominant forms of power and the perception of teachers as more knowledgeable.
Likewise, in contrast to a typical in-person classroom where all the students listen to the teacher who has all the “right” answers, and who relies on “written work as the primary means to assess student understanding (Paugh et al., 2018, p. 273)”, I am certain that multisensory learning experiences with robotics and making, will naturally produce multimodal artifacts that showcase student learning, and in turn force educators, parents, and policy makers to accept new forms of assessment, and encourage them to reflect on possibilities of reimagining education (Roy, 2020) and redefining what forms of knowing, being, doing, and making are valued, encouraged, and privileged.
References
Bers, M. U. (2008). Using robotic manipulatives to develop technological fluency in early childhood. Contemporary perspectives on science and technology in early childhood education, 105-125.
Paugh, P., Wendell, K., & Wright, C. (2018). Elementary engineering as a synergistic site for disciplinary and linguistic learning in an urban classroom. Literacy Research: Theory, Method, and Practice, 67(1), 261-278.
Roy, A. (2020). The pandemic is a portal. Financial Times, 3.
Marin, A. M. (2020). Ambulatory Sequences: Ecologies of Learning by Attending and Observing on the Move. Cognition and Instruction, 1-37.Vossoughi, S., Hooper, P. K., & Escudé, M. (2016). Making through the lens of culture and power: Toward transformative visions for educational equity. Harvard Educational Review, 86(2), 206-232.