In a recent episode of The Simpsons, “MoneyBart,” when floundering father, Homer, is confronted with his responsibilities, he decides to shirk them in order to get drunk (Long & Kruse, 2010). He justifies his choices by stating, “That’s a problem for future Homer! Man, I don’t envy that guy!”

Property of 20th Century Fox Television
Does this scene hit a little close to home (or should I say homer) to you? Perhaps you can recall a time or multiple times when you have avoided your own responsibilities or obligations. Have you ever procrastinated on an assignment? What about avoiding a party when you know someone you don’t like will be there? Have you ever lied in order to procure a quick exit from a conversation? What about avoiding looking at your old photos on Facebook after a nasty breakup? All of these examples involve avoidance techniques of emotion regulation in regard to situation selection/modification and attention deployment (for more information see my previous blog post), and include avoiding people, places, situations, events and even reminders of events that may cause an uncomfortable emotional response. This type of emotion regulation is common, but in certain conditions like posttraumatic stress disorder (PTSD), this type of avoidance behavior becomes maladaptive and leads to significant impairment in daily functioning (APA, 2013).
But why does avoidance feel so good in the moment, especially when we acknowledge that the downstream effects of avoidance may lead to issues in the future? Why does Homer choose to have fun while clearly knowing it will be problematic later? Before we can clearly discuss this topic, we must first examine how we learn to make connections between certain cues or conditions and our resulting responses to these cues.
The theory of classical conditioning was pioneered by Ivan Pavlov in the early 1900s. In a series of experiments with dogs, he showed that when presented with food (an unconditioned stimulus; US), the natural response or reflex for the dogs was to salivate or drool (an unconditioned response; UR), and that pairing an unrelated stimulus like a bell tone (a neutral stimulus that becomes a conditioned stimulus; CS) with the food eventually lead to the reflex response of drooling in response to just the bell tone (a conditioned response; CR; Pavlov, 2003). It is important to note that classical Pavlovian conditioning involves involuntary or reflex behaviors, but what about voluntary behavior?
Edward Thorndike ran a series of experiments where cats manipulated mechanisms in order to escape from “puzzle boxes” (summarized in Thorndike, 1898). The cats learned which responses released them and were able to escape the boxes more quickly. Thorndike reported that actions or responses that produced positive effects (e.g. opening the door to the cage) increased in frequency while responses that produced negative effects decreased in frequency; this is Thorndike’s famous Law of Effect! B. F. Skinner (1948) added to Thorndike’s research by introducing the idea that consequences shape behavior: a preceding discriminant stimulus (Sd) influences behavior by triggering a response (R); this leads to a contingent stimulus (Sr-/+), which is comprised of consequences that will become a new preceding stimulus to further influence behavior.
According to Skinner (1948), reinforcers increase the frequency of a behavior and punishers decrease the frequency of a behavior. Positive reinforcement/punishment involves a stimulus that is presented following a response. A child receiving a lollipop for good behavior is an example of positive reinforcement; there is presentation of a stimulus that is hoped to increase a behavior. A child receiving a spanking for bad behavior is an example of positive punishment; there is presentation of a stimulus that is hoped to decrease a behavior. Negative reinforcement/punishment involves a stimulus that is removed following a response. Not getting sunburned after putting on sunblock is an example of negative reinforcement; the removal of a stimulus is hoped to increase behavior. FYI, Homer’s behavior described above is also an example of negative reinforcement; the stress of his responsibilities is removed by procrastination, which influences his choice to put off his duties until later. Taking away a kid’s internet access for bad behavior is an example of negative punishment; removal of a stimulus is hoped to decrease behavior. Together, Thorndike and Skinner’s research provide the backbone for operant conditioning, a type of learning where behavior is influenced by preceding stimulus and the consequences behavioral choices.
Now that you know the basics of both voluntary and involuntary learning in behavior, let’s put it all together and discuss how this all relates to avoidance. The two-process theory of avoidance established by Rescorla and Solomon (1967) states that both classical AND operant conditioning occur in avoidance learning (Figure 1). Classical conditioning of fear involves an aversive US that is paired with a CS to learn a CR. For example, a veteran may have encountered roadside bombs during his tour of duty. He may have experienced an US like an explosion, which elicits an UR of fear and anxiety, and paired it with a previously neutral stimulus like roadside trash, which now becomes a CS that elicits a CR. This veteran, may start avoiding roadside trash because it now triggers a fear/anxiety response. Additionally, the two-process theory also includes operant conditioning where avoidance learning is associated with anxiety reduction. When the veteran encounters roadside trash, the anxiety he experiences acts as a precedent stimulus (Sd) to lead to an avoidance response (R), this leads to a consequence of removal of the anxiety (Sr-) through negative reinforcement, and this will act as a future Sd to increase the avoidance response. Therefore, avoidance behavior will increase because it removes anxiety.
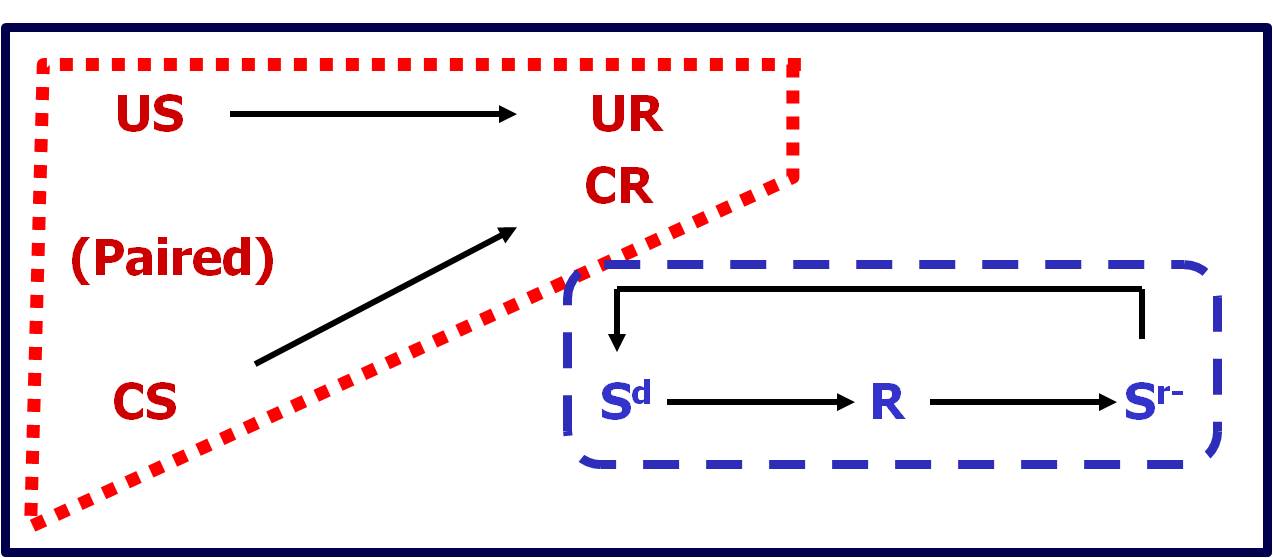
Figure 1. The two-process theory of avoidance learning involves both classical conditioning (red) and operant conditioning (blue).
In healthy individuals, this type of fear conditioning and avoidance learning can be unlearned when the CS is repeatedly presented without the US it was previously paired with. This process is called extinction, but in PTSD extinction learning is impaired, and individuals have trouble unlearning this fear response (reviewed in VanElzakker et al., 2014). One of the current models of PTSD discussed by VanElzakker and colleagues (2014) is that it reflects overactive learning of fear conditioning coupled with inability to properly extinguish the learned fear response. Interestingly, many of the same areas implicated in emotion regulation such as the amygdala, anterior cingulate cortex, and ventromedial prefrontal cortex have also been associated with fear conditioning and extinction (VanElzakker et al., 2014). Additionally, greater avoidance symptomatology in PTSD has been associated with increased activation in these regions during the learning of fear conditioning as well as during extinction (Sripada et al., 2013). Taken together, this suggests that avoidance emotion regulation may be connected to problematic fear conditioning and extinction in PTSD.
References:
American Psychiatric Association. (2013). Diagnostic and statistical manual of mental disorders. (5th ed.). Arlington, VA: American Psychiatric Association.
Long, T. L. (Writer), & Kruse, N. (Director). (2010). MoneyBart [Television series episode]. In A. Jean, J. Frink, J. L. Brooks, M. Groening, M. Selman, & S. Simon (Producers), The Simpsons. Los Angeles, CA: 20th Century Fox Television.
Pavlov, I. P. (2003). Conditioned reflexes. G. V. Anrep (Ed.) Mineola, NY: Dover Publications, Inc. (Original work published 1927)
Rescorla, R. A., & Solomon, R. L. (1967). Two-process learning theory: relationships between Pavlovian conditioning and instrumental learning. Psychological Review, 74(3), 151-182.
Skinner, B. F. (1948). Superstition in the pigeon. Journal of Experimental Psychology, 38(2), 168-172.
Sripada, R. K., Garfinkel, S. N., & Liberzon, I. (2013). Avoidant symptoms in PTSD predict fear circuit activation during multimodal fear extinction. Frontiers in Human Neuroscience. doi: 10.3389/fnhum.2013.00672
Thorndike, E. L. (1898). Animal intelligence: an experimental study of the associative processes in animals. Psychological Review, 5(5), 551-553.
VanElzakker, M. B., Dahlgren, M. K., Davis, F. C., Dubois, S., & Shin, L. M. (2014). From Pavlov to PTSD: the extinction of conditioned fear in rodents, humans, and anxiety disorders, Neurobiology of Learning and Memory, 113, 3-18.